

Chris Good's RC Page - The Good Air Force
|
|
I have been flying remote control planes since 1985
and have put
together a large fleet of aircraft; I have 107 RC aircraft as of February 2024.
All pictures are thumbnails, so click on them to see a larger version.
Flying Wings & FPV Aircraft Relay Wing VTOL & helicopters Multi-rotors Glow powered planes & helicopters Large electric planes Foam electric planes Gone Night Flyers RC Electronics RC Aerial Photography & Video Flying Fields For What Its Worth Telebee 701 Gyro $8 RC Airplane
Flying Wings & First Person View (FPV) Aircraft
 |
16 Foot Wingspan Flying Wing - Built from my own plans. This wing has flown in two powered versions, originally powered by two OS 91 VR-DF ducted fan engines with tuned pipes and Dynamax fans. I then removed the ducting, and modified the center section to accept a Super Tigre 3000 (30 cc) engine with 18" prop. It flies much better with the Super Tigre 3000 engine. Eppler 334 airfoil. 35+ pounds total weight with engines and ducted fans, slightly less with the ST 3000. The drag rudders are controlled by a special PIC controller. This page contains the schematics and source code for the PIC 12C508 drag rudder controller. Six channels [ elevons(2 servos), throttle(1 servo), nose steering(1 servo), drag rudders(2 servos)] FLOWN with ducted fans, FLYING with ST 3000 |
|
 |
13 Foot Wingspan Flying Wing - Built from my own plans; Eppler 334 airfoil, 15 pounds with 6S 5000 mah lipo batteries, 5065 brushless outrunner motor with 50A ESC. The drag rudders are controlled by a special PIC controller. This page contains the schematic and programming for the 12C508 PIC drag rudder controller. Seven channels [ elevons(4 servos), throttle(ESC), pneumatic retracts(1 servo), nose steering(1 servo), drag rudders(2 servos)] FLYING |
|
|
Blue Foam and Pink Foam Wings : I designed these wings to be built using either Dow blue foam or Owens-Corning pink foam 1/4" thick insulation. The main strength comes from carbon fiber doublers on the foam spars and cross bracing. I have built many copies of various sizes, and conducted a pink wing group build with my club. I worked with 12 flyers so everyone could have their own foam flying wing. There are 13 pink flying wings in our RC club now, all built in my garage over several build sessions. I provided the templates and plans, carbon fiber spars, foam, tape, glue, and building instructions, and everyone paid for or brought their own electronics. The standard wing has a two meter wingspan and is powered by 480 outrunner with a 40A ESC. All of the 5.5' span and larger wings have GoPro camera mounts and I have shot aerial video all over the US and Scandinavia with these wings. Most of these wings are set up for FPV, and another one is a transitioning VTOL tri-copter. |
||




.jpg)


 |
||
 |
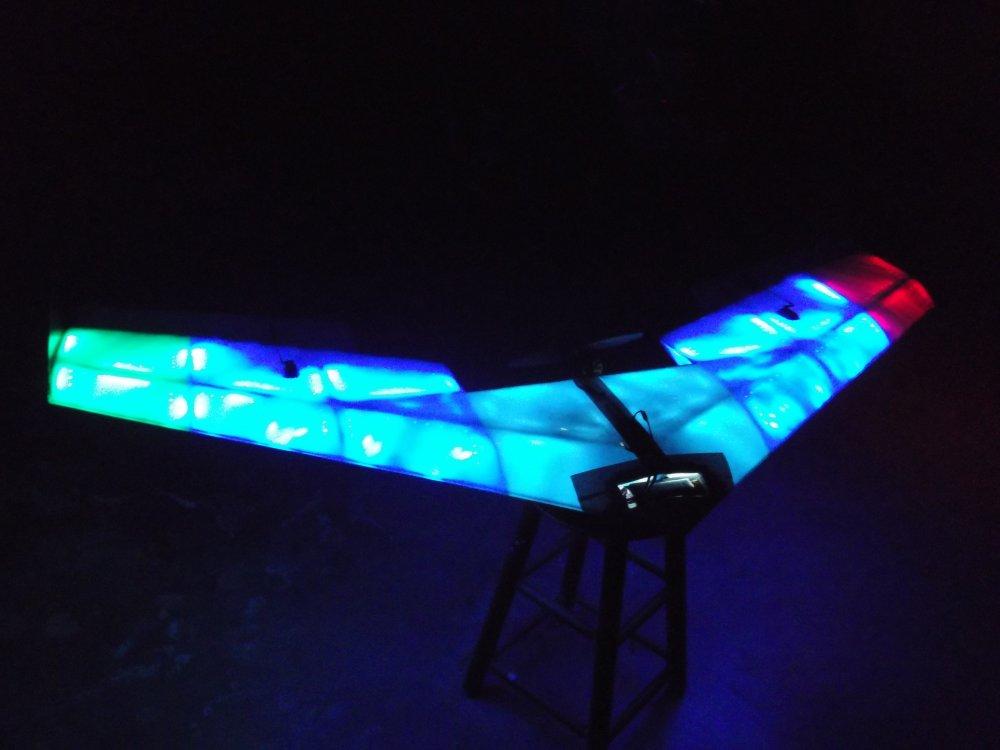
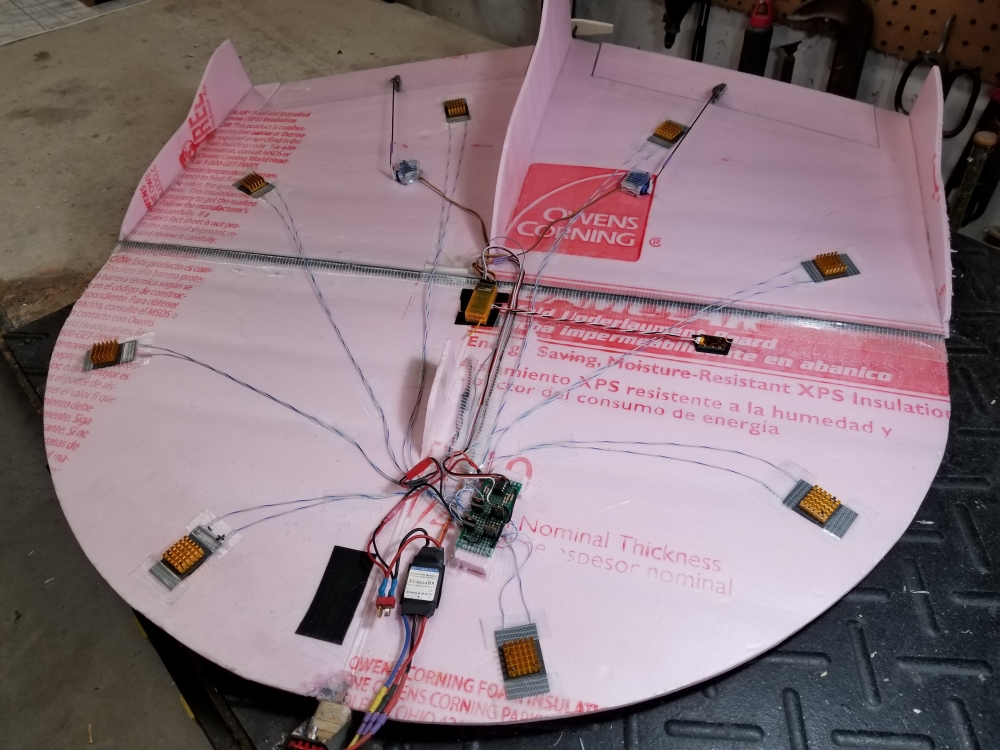
13 Foot Wingspan Pink Wing LED - Scaled up version of my 6 foot wingspan flying wings. This wing is powered by twin Tower Pro 3520 outrunner brushless motors, each with a 50A ESC. See this page for details and construction photos. The wing has external white LED strips facing down, internal LED strips to light the wing from the inside, red and green LED wingtip lights, 16 super-bright LEDs facing down, and 7 super-bright LED COB lightbulbs. |
|
 |
9 Foot Wingspan Blue Wing LED - This is a scaled up version of the 6 foot wingspan Blue Wing, with an E-Flite 32 motor and 50A ESC. There is a HK 401B gyro on each elevon servo, each tilted to allow stability on both the pitch and roll axis. It has a GoPro mount, red and green LED wingtip lights, and 6 super-bright LEDs facing down. The super-bright LEDs are controlled on/off via a commercial RC switch. The photos below are construction and flight photos of this 9' wing. FLYING
|
|
  Ducted fan power |
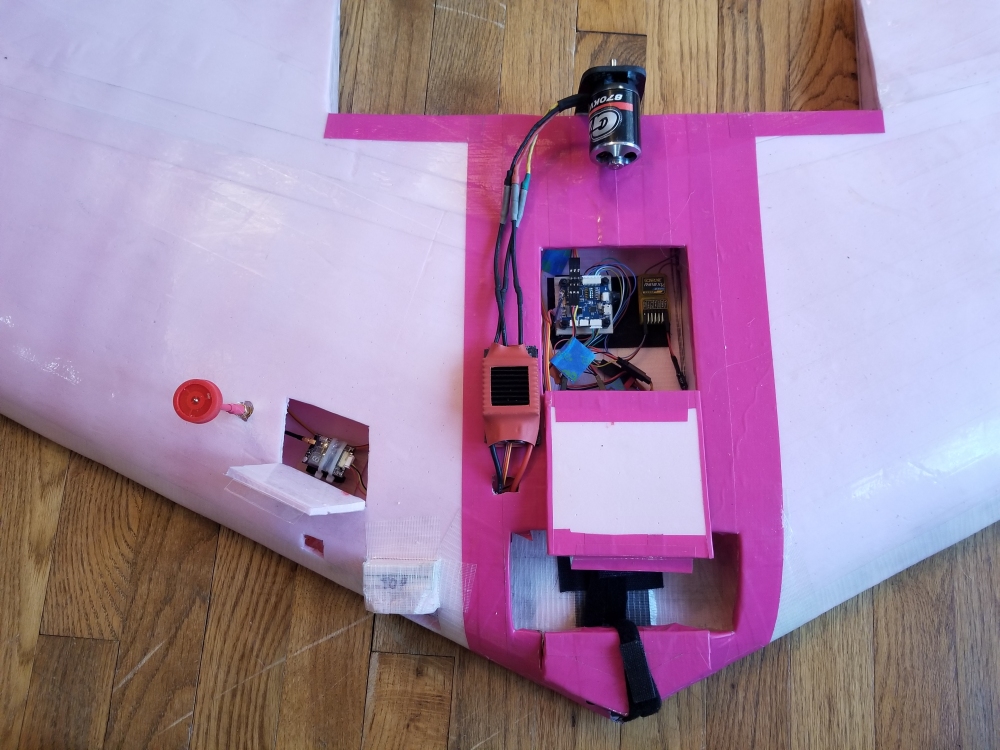
8.5 Foot Wingspan Pink Wing LED FPV - This wing is powered by a large brushless outrunner with a 70 amp ESC, spinning a 16" pusher prop. The motor runs on a 5S lipo and draws 1000 watts a WOT. This wing takes off at 1/2 throttle in less than 50 feet, and flies around easily at 1/3 throttle. This wing uses a very similar layout to the 9' Blue Wing above, with one HK401B gyro on each servo for stabilization, and 6 super-bright LEDs facing down. The super-bright LEDs are controlled by a homemade flashing circuit with a PIC 12C508 reading a channel from the RC receiver and driving five TIP120 transistors. The circuit and PIC code is available on the LED page. FLYING - FPV This wing was originally powered by a 4.75" electric ducted fan, shown to the bottom left, but I replaced that with the outrunner and pusher propeller which is much more efficient and quiet. The ducted fan version used a 60 amp high voltage ESC, which I reflashed with BlHeli firmware. It drew 45 amps @ 37.8 volts (9S), or 1700 watts at wide open throttle on a fresh battery. Eachine 800mW 5.8GHz video transmitter 1200 TVL 5-12V camera LC filter for cleaner video OSD for battery voltage - dual voltage sensors; sensor #1 reads the main pack voltage (5S), and sensor #2 reads the separate FPV battery voltage (3S) GoPro mount |
|
|
Flight Controllers - I have almost 50 flight controllers in my FPV airplanes and multi-rotors. My fixed wing FPV aircraft use flight controllers running iNav, and my multi-rotors use flight controllers running BetaFlight, with several different types of F1, F3, F4, and F7 flight controllers: Naze32 F1, Flip32 F1, Fusion Vortex F1, CC3D F1, Flip32 F3, SP Racing F3, Omnibus F4, CL Racing F4, Furious Racepit F4, Matek F7, and Aikon F7. See this page for details on all these flight controllers. |
||
  |
7 Foot Wingspan FPV Pink Wing - Flip32 F1 FC with MWOSD - I used the last of the left-over pink foam from my club group build to make this wing. It is powered by a Turnigy G25 outrunner and a Red Brick 50A ESC. FLYING - FPV Flip32 F1 flight controller all-in-one (AIO), MWOSD 2.0 SW - barometric pressure sensor for altitude, current and voltage sensors - flashed and configured special compile of iNav 1.7.2 via USB - flashed and configured MWOSD 2.0 via USB with MWOSD 2.0 Configurator - uplink commands from DSMX receiver via PPM - COM1: MWOSD (shared with USB) - COM2: GPS 5 hz update Orange 618XL 6ch DSMX receiver with PPM output Boscam TS832 600mW 5.8GHz video transmitter uBlox GPS receiver 1200 TVL 5-12V camera LC filters for power to FC, camera, video transmitter for cleaner video GoPro mount |
|
 |
6 Foot Wingspan Blue Wing LED - This was the second foam wing I built from my own plans, and I filled the inside of wing with hundreds of blue, white, green, and red LEDs that make the plane glow at night from the inside. I have also added several hundred LEDs on the outside; all the LEDs together draw 6 amps at 11 volts. The flight controller and GPS allow this wing to loiter autonomously at night. FLYING Flip32 F1 flight controller all-in-one (AIO), No OSD - barometric pressure sensor for altitude, current and voltage sensors - flashed and configured special compile of iNav 1.7.2 via USB - COM1: USB only (no FPV / MWOSD) - COM2: Crossfire uplink commands, downlink telemetry - COM3: GPS 5 hz update, soft-serial @ 9600 baud (yes, this works, and the GPS is reliable) Crossfire Nano Receiver - use TBS LUA scripts to configure Rx output channels - Rx channel 1 & 2 : Crossfire Tx/Rx uBlox GPS Remote Power Switch - three banks of LEDs on plane : top / inside / bottom - inside LEDs are always on making plane glow from the inside as shown in photo to the left - remote power switch controls outside LEDs on top and bottom |
|
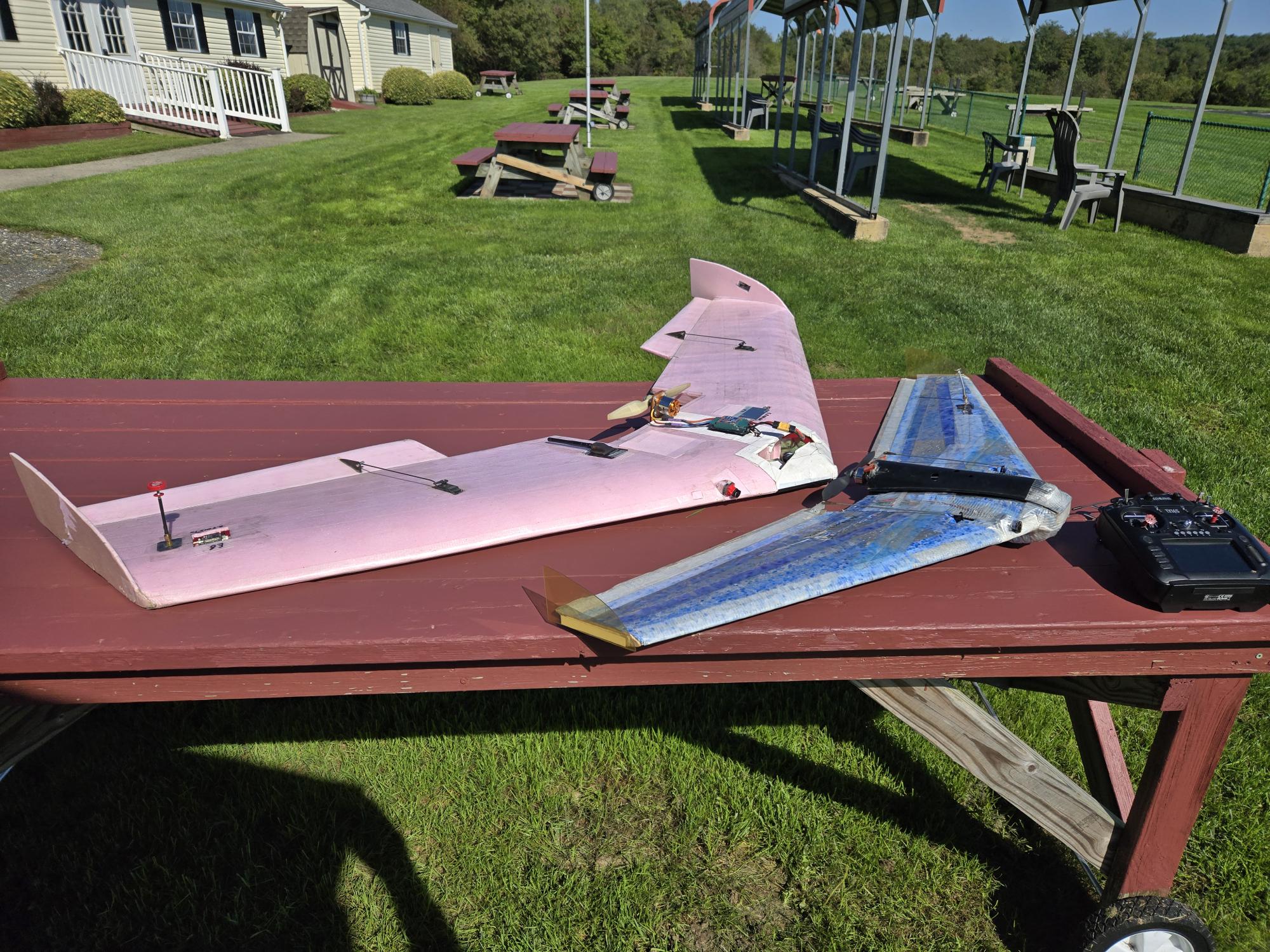 |
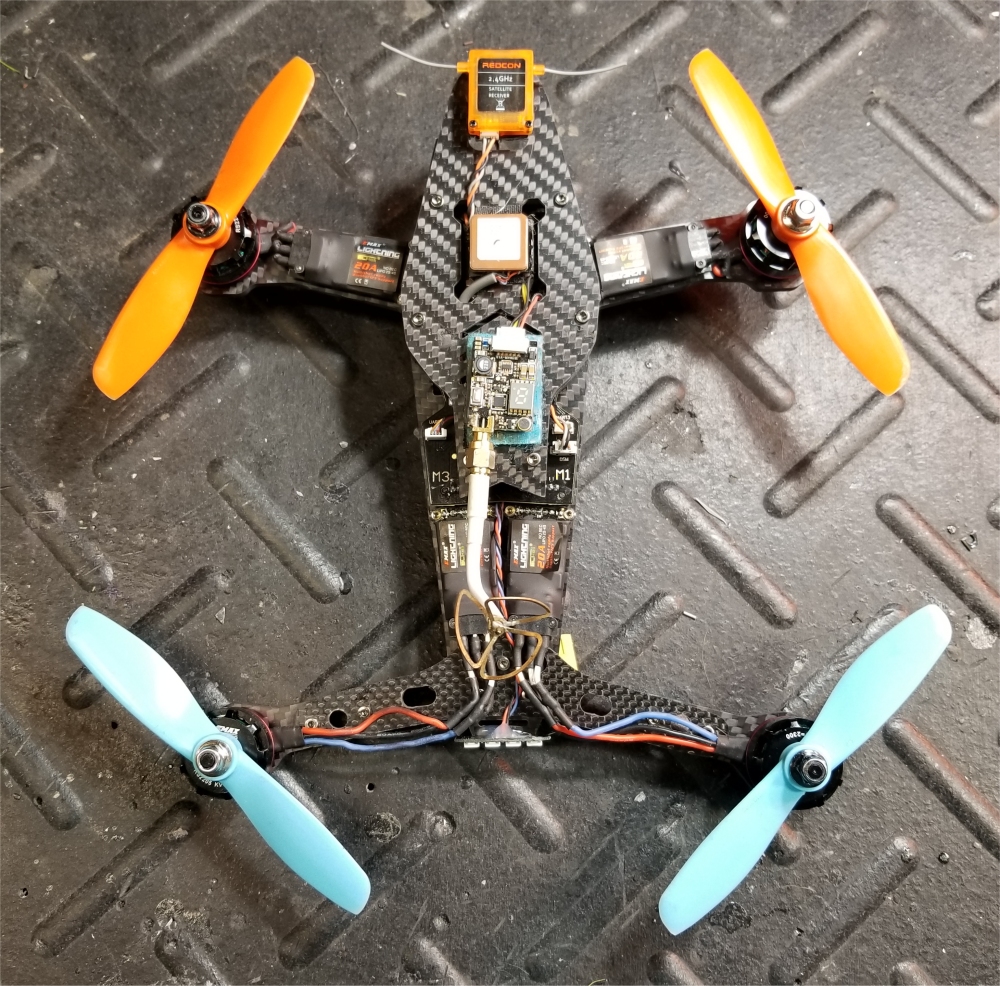
6 Foot Wingspan Relay Pink Wing FPV - This FPV wing is used as an airborne relay for controlling the Razor FPV wing. This flying combination uses the most complicated radio and electronics setup that I have ever implemented for the RC hobby. The second photo to the left shows the Relay and Razor wings together, after their first dual flight. Power comes from a 480 outrunner with a 50A ESC, running on a 3S lipo. FLYING - FPV See this page for all the details on how this plane is configured with this hardware : Omnibus F4 V3 flight controller - iNav 7.1.1 Crossfire Nano Receiver - 915 MHz Eachine TX1200 5.8 GHz Video Transmitter Boscam/Skyzone RC305 5.8 GHz Video Receiver Lemon DSMP Transmitter Module - 2.4 GHz Beitian BE-220 GPS receiver Mista MS-519 FPV Nose Camera ViFly Two Input Video Switch Remote Power Switch |
|
 |
4 Foot Wingspan Razor FPV - EPP foam, 2410 outrunner and 18 amp ESC, Lemon Stabilized 7ch DSMX receiver + Lemon satellite receiver in right wing, five channels [ elevons(2 servos), throttle(ESC), stabilizer on/off, master gain ]. I have this wing set up for FPV flying; it has a Foxeer camera at the base of the right wing with a built-in voltage OSD, and a 600 mw video transmitter in the left wing. The nose holds a GoPro Session 5 or Caddx Orca to record 4K high definition video. FLYING - FPV Razor Aerial Video Examples: Aerial Video, Aerial Video |
|
 |
F-27 Stryker Yellow FPV : EPP foam fuselage, 2210-2500 kv outrunner and 30A ESC, Lemon Stabilized 7ch DSMX receiver + Lemon satellite receiver, five channels [ elevons(2 servos), throttle(ESC), stabilizer on/off, master gain ]. I have this delta wing set up for FPV flying; it has a Foxeer Monster camera in the nose with a built-in voltage OSD, and a 600 mw video transmitter right behind the camera. FLYING - FPV |
|
 |
6 Foot Wingspan FPV Pink and Blue Travel Wing - ARTower F4 - I built this wing for traveling; the wing comes apart into three sections that can be put together quickly with bolts and blind nuts to join the center and wingtip carbon fiber spars. It is a direct copy of my other 6 foot flying wings except for the three separate wing sections. The lower left wing surface is made from blue foam and the rest of the wing is made from pink foam. There are more details of the construction on my flying wing webpage. The ARTower F4 flight controller uses a special compile of iNav 7.1.1 that uses the available resources to the best advantage. FLYING - FPV ARTower F4 Plus flight controller - flashed and configured iNav 7.1.1 custom compile via USB - flight controller has a built-in 200mw video transmitter, but I have de-soldered that video transmitter - video output from OSD to built-in video transmitter re-routed to external AKK 800mw video transmitter - COM1: Crossfire uplink commands, downlink telemetry - COM3: GPS - Soft Serial COM : SmartAudio control of video transmitter - TX to video transmitter SmartAudio - switch on TX16S instantly sets low/medium/high power Crossfire Diversity Receiver - use TBS LUA scripts to configure Rx output channels - Rx channel 3 & 4 : Crossfire Tx/Rx AKK 800mw 5.8 GHz video transmitter - SmartAudio is connected to flight controller, switch on TX16S instantly sets low or high power - AKK video transmitter has SmartAudio bug, need to set "vtx_smartaudio_early_akk_workaround = on" at iNav CLI Mista MS-519 FPV Nose Camera Beitian BN-220 GPS Receiver LC filter for cleaner video, supplies power to flight controller, video transmitter, camera, Crossfire receiver, GPS GoPro mounts - one on nose, one on top center |
|
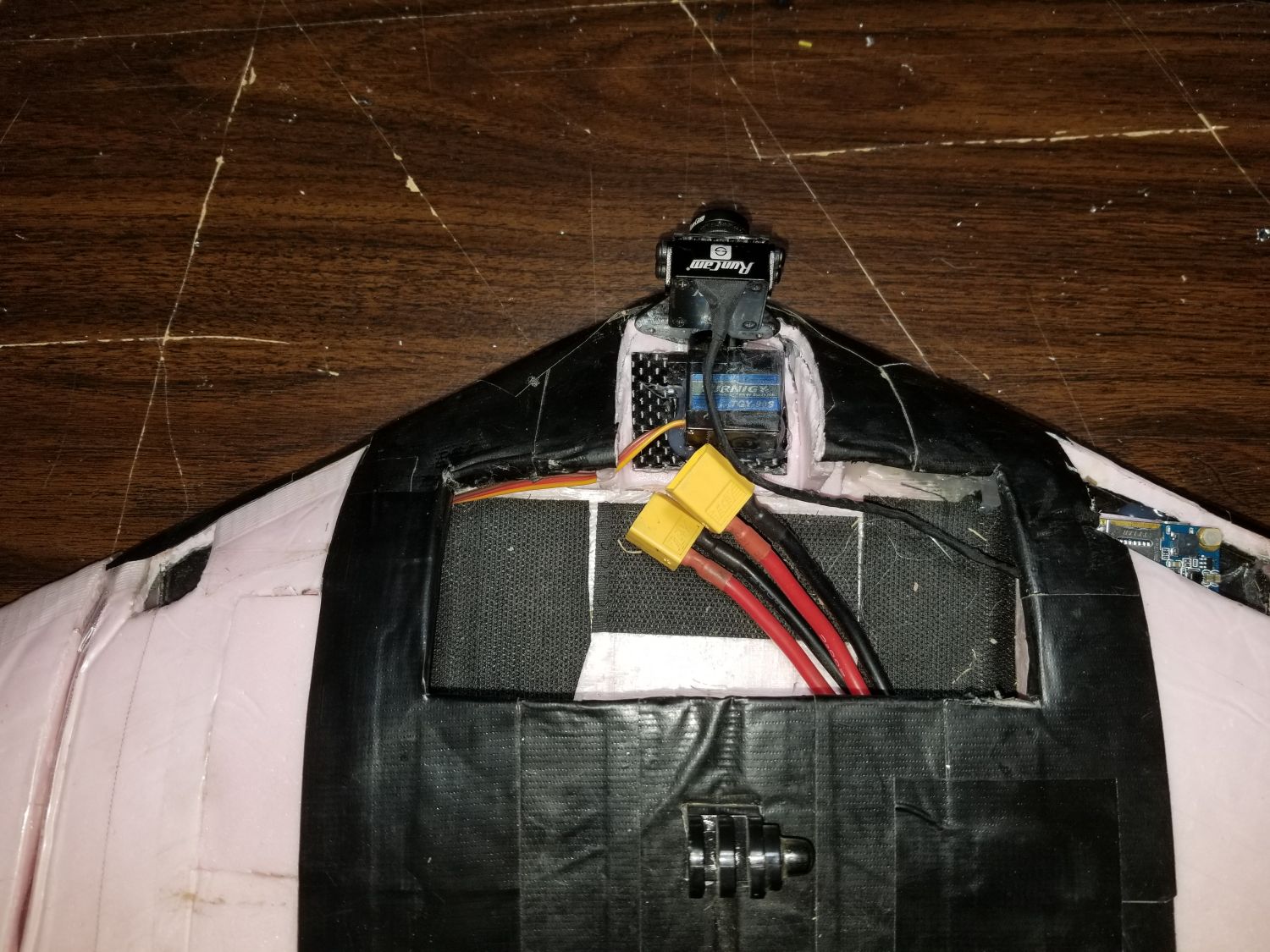 Nose Cam  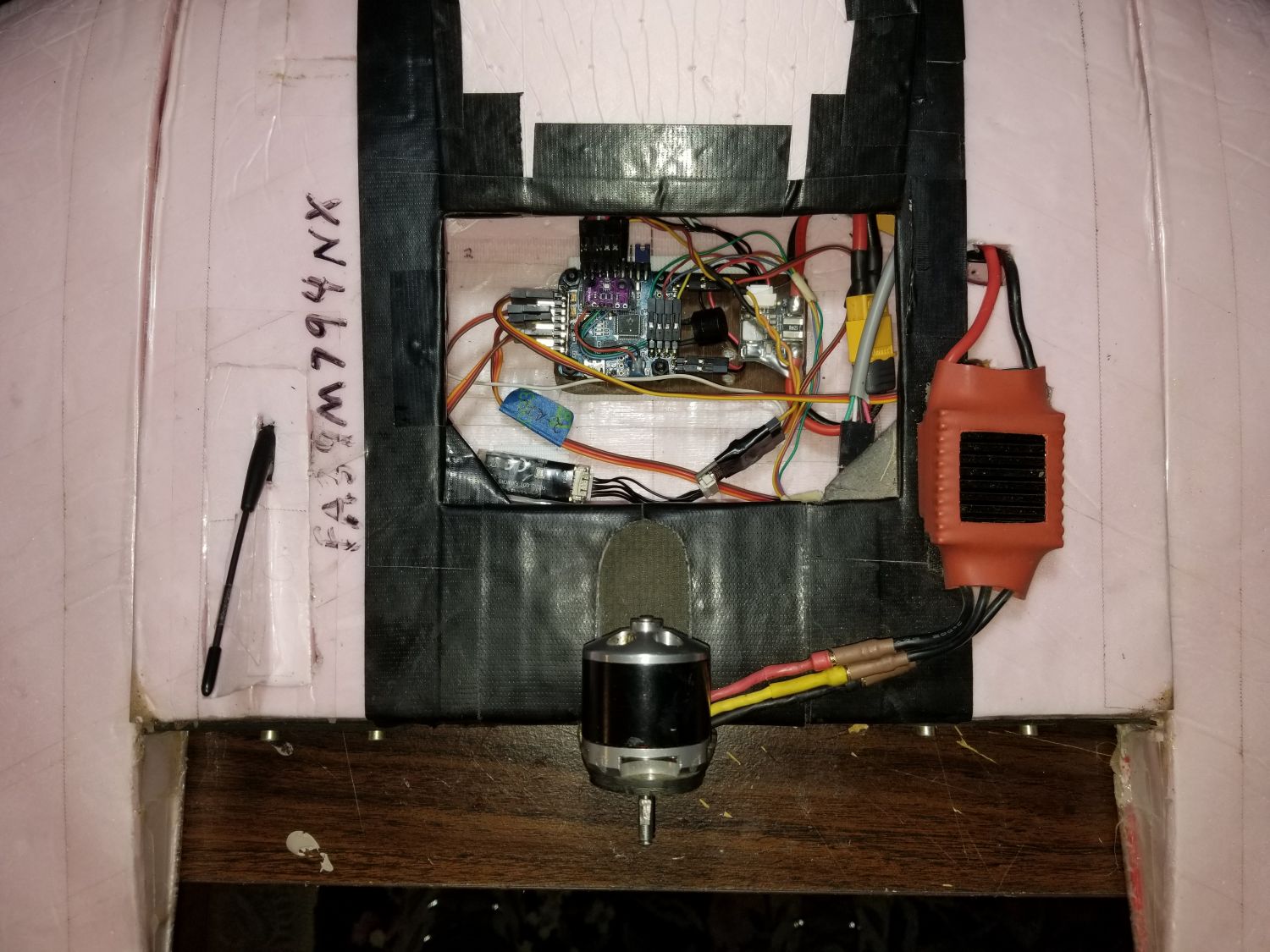 |
5 Foot Wingspan FPV Pink Travel Wing - I built this wing for traveling, using the same wing separating sections as the 6' travel wing, but the overall span is only 5 feet to allow it to fit in smaller luggage. It is powered by a 450 outrunner and 50A ESC. The ESC BEC provides 5V power for the servos; this 5V power is separate from the 5V power for the avionics which comes from a 7805 regulator with a large capacitor to protect against avionics brownout. Servos / control: left elevon (1 servo), right elevon (1 servo), throttle (ESC) FLYING - FPV The avionics have gone through four configurations, as I have experimented with different flight controllers. - The first configuration used a Naze32 F1 flight controller and a Lemon DSMX receiver. - The second configuration used a Flip32 F3 flight controller and a Crossfire receiver. - This setup also had a Runcam Split V2 HD nose camera with a servo for stabilized gimbal roll. - The third configuration used a Flip32 F1 flight controller and a Crossfire receiver. - The fourth and current configuration uses a SP Racing F3 flight controller and Crossfire receiver. - This setup also has separate MinimOSD hardware running MWOSD 2.0. SP Racing F3 flight controller + MinimOSD - barometric pressure sensor for altitude, current and voltage sensors - flashed and configured iNav 2.6.1 via USB - flashed and configured MWOSD 2.0 via FTDI adaptor with MWOSD 2.0 Configurator - COM1: MWOSD (shared with USB) - COM2: Crossfire uplink commands, downlink telemetry - COM3: GPS 5 hz update Crossfire Nano Receiver in right wingtip - use TBS LUA scripts to configure Rx output channels - Rx channel 1 & 2 : Crossfire Tx/Rx - Rx channel 4 : SmartAudio - controls video transmitter via Crossfire LUA scripts on TX16S transmitter - RC channel 8 is set to output RSSI as signal, flight controller reads channel 8 for RSSI in video overlay AKKTek FX2 Dominator 5.8 GHz VTx in left wingtip - SmartAudio is connected to Crossfire receiver to allow video transmitter control from TX16S Beitian BN-180 GPS receiver in center wing Nose camera GoPro mount on the nose to hold a GoPro 10 with built-in video stabilization at 4K resolution LC filter for clean 12V power to video transmitter |
|
 |
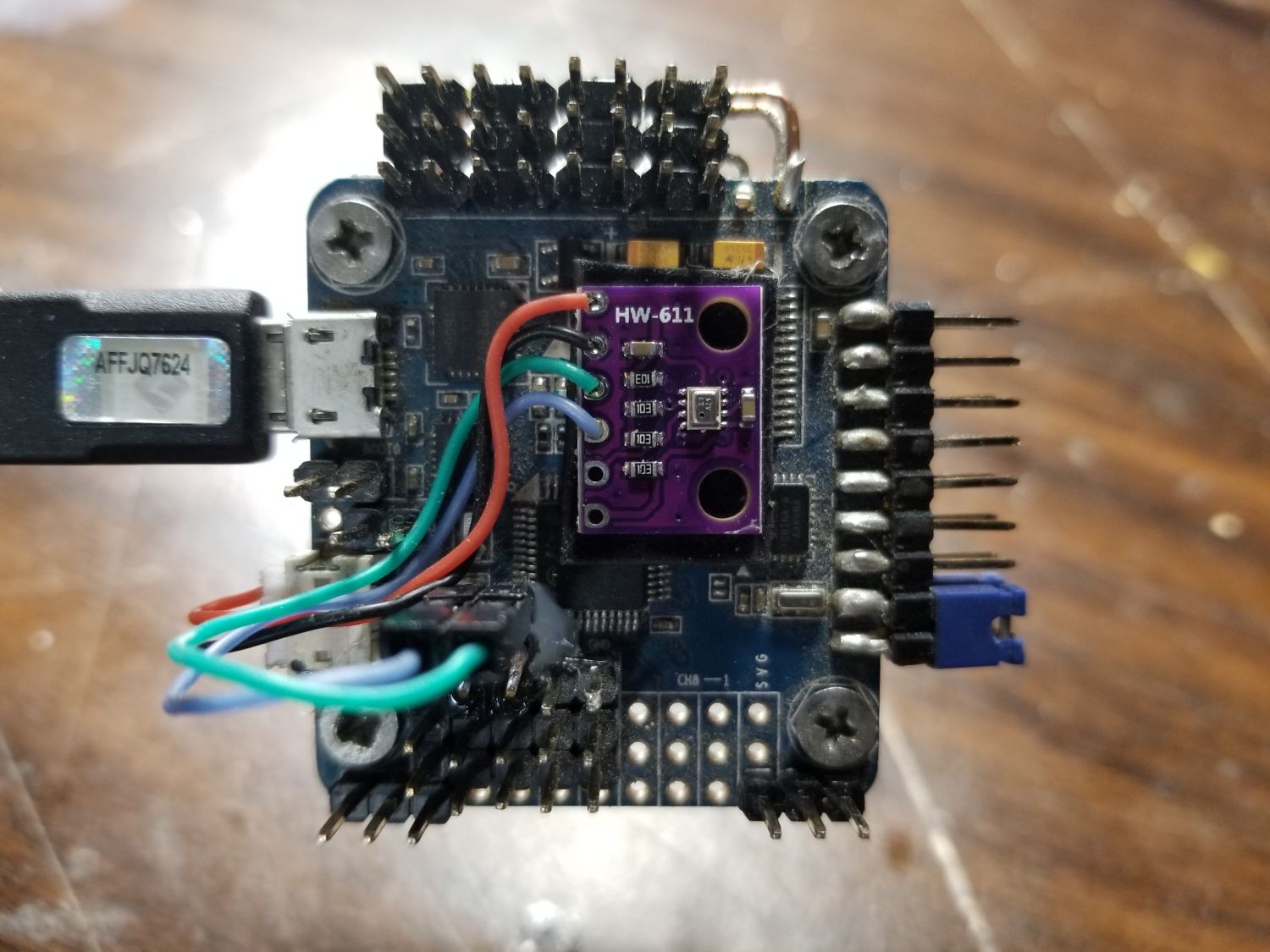
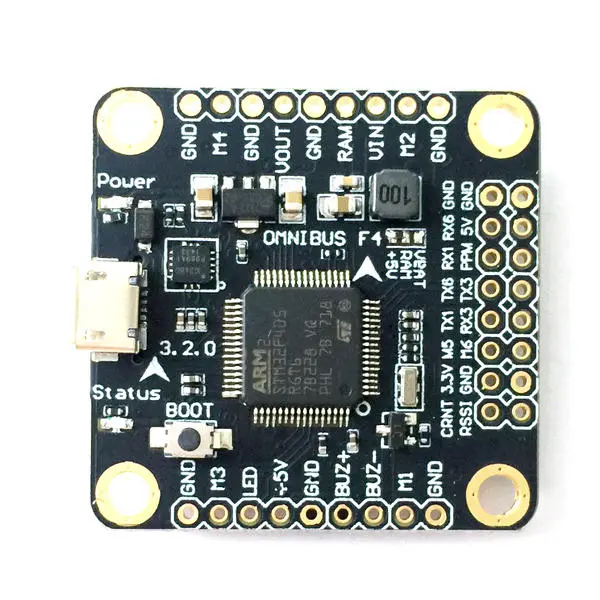
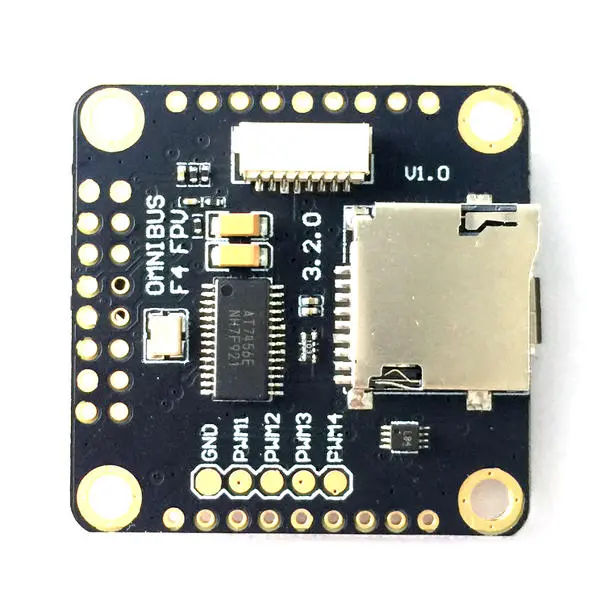
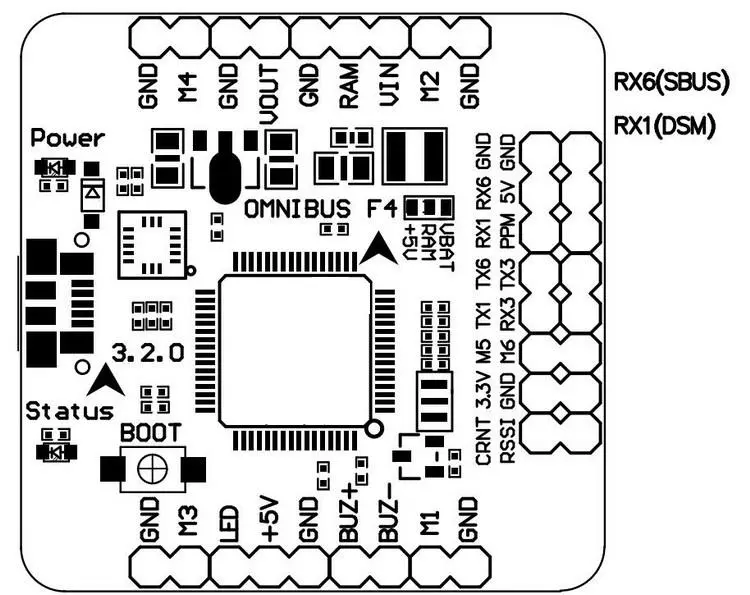
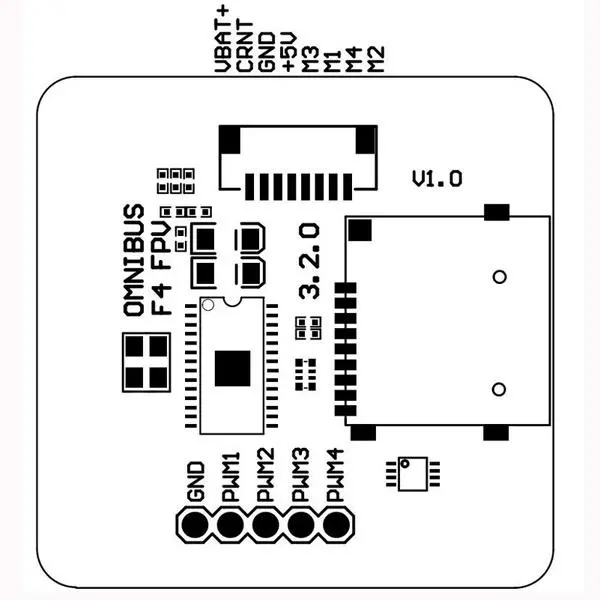
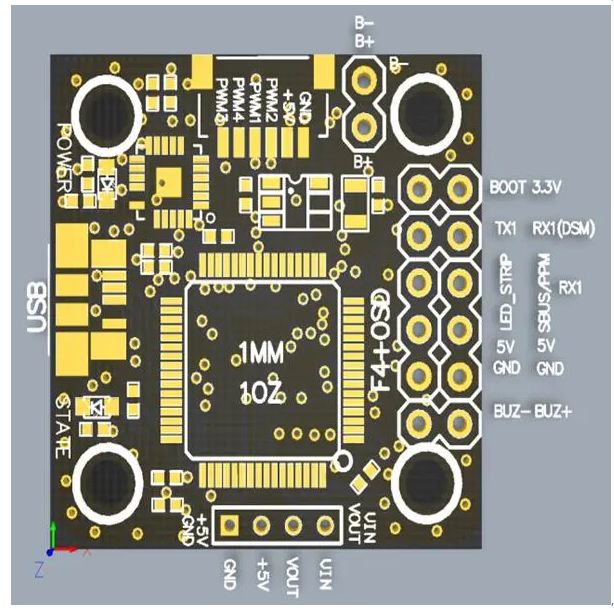
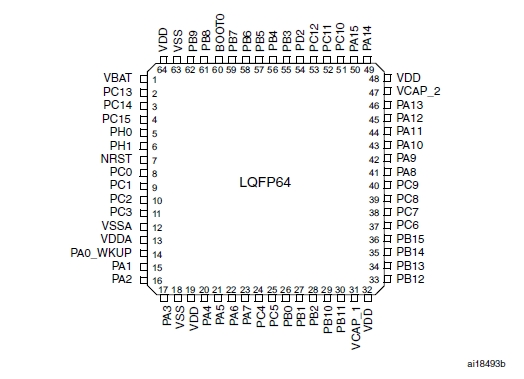
TBS Caipirinha 2 FPV Flying Wing - EPP foam wing. This is another wing for traveling, as it comes apart into even smaller pieces than the 5' wing traveling wing shown above. I bought the airframe and added all the electronics through two configurations. The first configuration used a stabilized Lemon 7 channel DSMX receiver and FPV equipment. Once I was comfortable with hand launching and flying this wing, I took out the Lemon receiver and installed the F4 flight controller, Crossfire receiver, GPS, and 5V BEC. Power comes from a 3S2P 18650 Li-Ion battery pack (~6000 mah), 2836 1200kv outrunner, and 40A ESC. Servos / control: left elevon (1 servo), right elevon (1 servo), throttle (ESC) FLYING - FPV GPS Arming Fix: Somehow the gps_max_eph_epv setting got changed to 1.0 in my iNav 7.1.1 configuration. This means that the maximum estimated GPS horizontal and vertical errors allowed are 1 cm (!). The flight controller will not arm with any normal error value. The default value is 1000.0, or 10 meters. If you find you can't arm your motor but you have a good position fix with plenty of satellites, check this value and set it back to its default if it is not there already: "set gps_max_eph_epv = 1000" ... and "save" the configuration. Omnibus F4 [V1] "3.2.0" flight controller - photo front, photo back, pinout front, pinout back - flashed and configured iNav 7.1.1 custom compile via USB - BMP280 baro pressure sensor added to FC via I2C device 2 - COM1 : Crossfire uplink commands, downlink telemetry - COM3 : Used for BMP280 baro input via I2C; I2C-2 and COM3 share same I/O : PB10 and PB11 - COM6 : GPS - Soft Serial COM : SmartAudio control of video transmitter - TX to video transmitter SmartAudio - switch on TX16S instantly sets low/medium/high power Crossfire Nano Receiver - use TBS LUA scripts to configure Rx output channels - Rx channels 1 & 2 : Crossfire Tx/Rx 5.8 GHz Video Transmitter - SmartAudio is connected to flight controller to allow video transmitter control from TX16S uBlox GPS Mount for GoPro Session 5 / Caddx Orca 4K Stabilized Cameras Separate Foxeer FPV Camera LC filter for clean 12V power --> video transmitter, camera, and 5V BEC 5V BEC for power --> flight controller, Crossfire Rx, GPS |
|

|
Half-Scale Shadow 200 FPV : I built this in 2002 from the plans of the real US Army Shadow 200 Tactical Unmanned Aerial Vehicle (TUAV). I am a principal systems engineer and senior flight test director for the Shadow program. I have used this scale model aircraft for the initial training of our external pilots (EP's) for Shadow. This was originally powered by an OS 61 SF with V-Tech pipe, but I later installed an electric propulsion system in place of the original glow engine. Propulsion comes from a TowerPro 4130 outrunner motor and a 70A ESC. In early 2024, I installed a flight controller and FPV system, with a Crossfire control and telemetry link. Five surface channels [ elerudders(2 servos), ailerons(2 servos), flaps(2 servos), throttle(ESC), nose steering(1 servo) ] + two flight controller channels [ motor arm, flight mode ] FLYING @ 22 years old in 2024 Flip32 F3 flight controller / MWOSD 2.0 AIO flight controller, 5V input, manual - flashed and configured iNav 2.6.1 via USB - BMP280 baro pressure sensor added to FC via I2C - flashed and configured MWOSD 2.0 via USB with MWOSD 2.0 Configurator - COM1: MWOSD (shared with USB) - COM2: Crossfire uplink commands, downlink telemetry - COM3: GPS Crossfire Micro Receiver - nose of fuselage, antenna mounted vertically - use TBS LUA scripts to configure Rx output channels - Rx channel 1 & 2 : Crossfire Tx/Rx - Rx channel 4 : SmartAudio - controls video transmitter via Crossfire LUA scripts on TX16S transmitter - RC channel 8 is set to output RSSI as signal, flight controller reads channel 8 for RSSI in video overlay Wolfwhoop QX-3 1 watt 5.8 GHz video transmitter - aft end of fuselage, antenna mounted down - SmartAudio control from Crossfire receiver channel 4 - built-in DVR, requires micro-SD card uBlox GPS under hood Holybro PM02 Power Module, manual - provides LC filtered 5.2V @ 3 amps max to flight controller, GPS, Crossfire Rx, Runcam Split V1 - includes shunt for measuring current draw 5V/6V Switching Regulator - provides power to servos; keep servo and flight controller power separate ! Runcam Split V1 - camera on vibration isolation mount in payload bay, looking forward - down - main board in avionics bay for easy access to micro-SD memory card |
|
 |
NanoTalon FPV - EPP foam plane. I bought the airframe at the Lebanon PA swap meet in 2019. Like the larger Talon that I bought in 2018, the Nano version had most of the electronics already in place. I added a receiver and FPV equipment, and cleaned up the linkage to the elerudders for sharper control, as the stock connections have a lot of slop. I also added separate servos for each aileron, to keep that linkage tight. This planes flies very well, and comes apart into small pieces that easily fit into luggage to take on trips. It snaps together and can be assembled to fly in a few minutes. This plane is tiny and disappears quickly when flying line of sight, so it is a good thing it is made for FPV. Servos / control: left elerudder (1 servo), right elerudder (1 servo), ailerons (2 servos), throttle (ESC) FLYING - FPV Flip32 F1 flight controller all-in-one (AIO), MWOSD 2.0 SW - barometric pressure sensor for altitude, current and voltage sensors - flashed and configured special compile of iNav 1.7.2 via USB - flashed and configured MWOSD 2.0 via USB with MWOSD 2.0 Configurator - COM1: MWOSD (shared with USB) - COM2: Crossfire uplink commands, downlink telemetry - COM3: GPS 5 hz update, soft-serial @ 9600 baud (yes, this works, and the GPS is reliable) Crossfire Nano Receiver in right wing - use TBS LUA scripts to configure Rx output channels - Rx channel 1 & 2 : Crossfire Tx/Rx - Rx channel 4 : SmartAudio - controls video transmitter via Crossfire LUA scripts on TX16S transmitter - RC channel 8 is set to output RSSI as signal, flight controller reads channel 8 for RSSI in video overlay AKK X2 Ultimate 5.8 GHz video transmitter on nose hatch - SmartAudio is connected to Crossfire receiver to allow video transmitter control from TX16S transmitter Beitian BN-180 GPS receiver in left wing Mount for GoPro Session 5 / Caddx Orca 4K Stabilized Cameras Separate Caddx FPV Camera LC filter for clean 12V power to flight controller and FPV equipment 30A ESC w/ BEC for servos - servo power bus is separate from avionics Motor is mounted on vibration isolators |
|
 |
Reptile 800 FPV Flying Wing Flip32 F1 flight controller all-in-one (AIO), MWOSD 2.0 SW - barometric pressure sensor for altitude, current and voltage sensors - flashed and configured special compile of iNav 1.7.2 via USB - flashed and configured MWOSD 2.0 via USB with MWOSD 2.0 Configurator - COM1: MWOSD (shared with USB) - COM2: Crossfire uplink commands, downlink telemetry - COM3: GPS 5 hz update, soft-serial @ 9600 baud (yes, this works, and the GPS is reliable) Crossfire Nano Receiver - use TBS LUA scripts to configure Rx output channels - Rx channel 1 & 2 : Crossfire Tx/Rx - Rx channel 4 : SmartAudio - controls video transmitter via Crossfire LUA scripts on TX16S transmitter - RC channel 8 is set to output Crossfire LQ/RSSI as signal, flight controller reads channel 8 for RSSI in video overlay AKK 800mw 5.8 GHz video transmitter - SmartAudio is connected to Crossfire receiver to allow video transmitter control from TX16S transmitter GPS uBlox receiver Mount for GoPro Session 5 / Caddx Orca 4K Stabilized Cameras 1200 TVL 5-12V FPV Camera LC filter - cleans all power to flight controller, camera, and video transmitter 30A brushless ESC - 5V BEC provides power to servos (separate power from FC/camera/VTx) |
|
 |
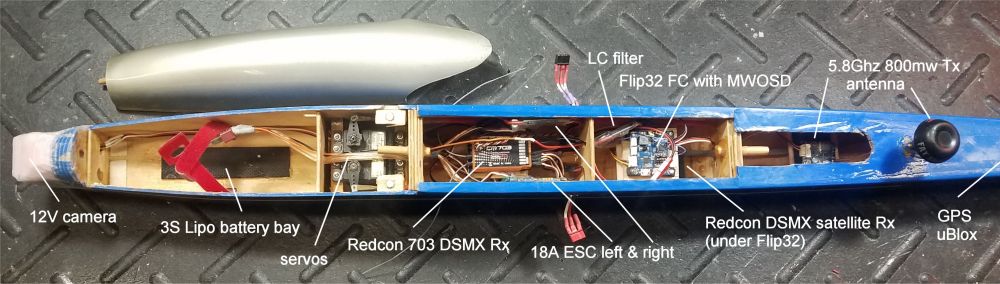
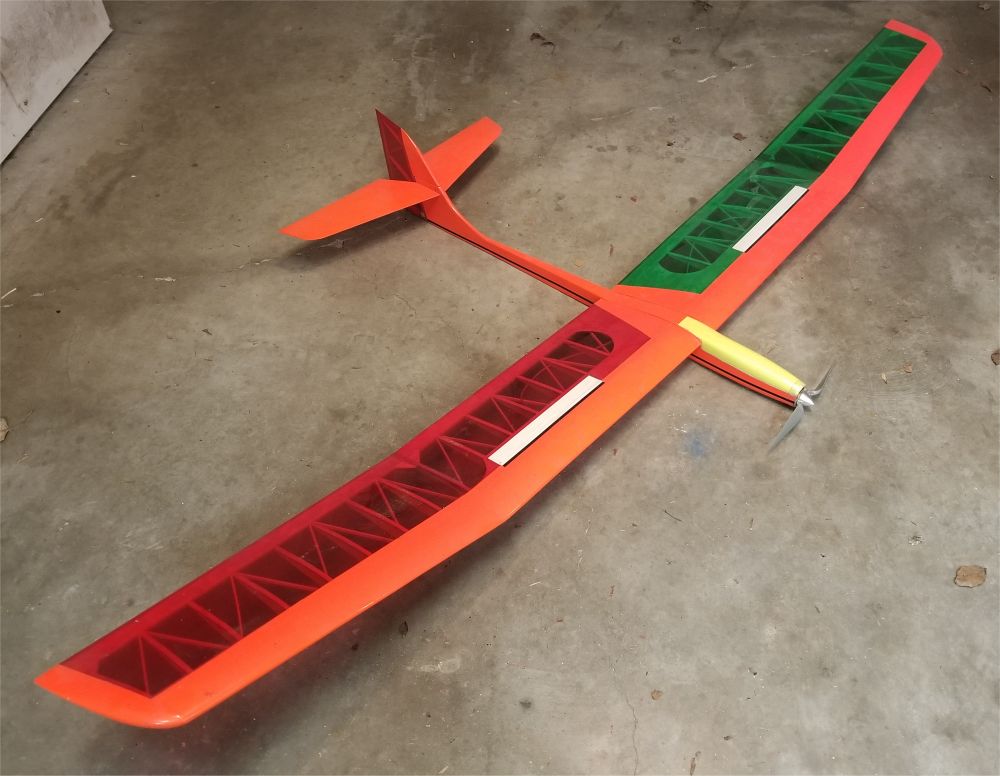
Paragon FPV - Flip32 F1 FC with MWOSD - I built this three meter wingspan glider from a kit in 1988. I converted it to electric power in 2009 with twin 2410 outrunners and 18A ESCs. I added FPV equipment in 2017, and updated the radio to Crossfire in 2024. Five channels [ left & right motors(ESCs), rudder(1 servo), elevator(1 servo), flight controller modes (3 aux channels) ] FLYING - FPV Flip32 F1 flight controller all-in-one (AIO), MWOSD 2.0 SW - barometric pressure sensor for altitude, current and voltage sensors - flashed and configured special compile of iNav 1.7.2 via USB - flashed and configured MWOSD 2.0 via USB with MWOSD 2.0 Configurator - COM1: MWOSD (shared with USB) - COM2: Crossfire uplink commands, downlink telemetry - COM3: GPS 5 hz update, soft-serial @ 9600 baud (yes, this works, and the GPS is reliable) Crossfire Nano Receiver (replaced Redcon 703 receiver shown in photo) - use TBS LUA scripts to configure Rx output channels - Rx channel 1 & 2 : Crossfire Tx/Rx - Rx channel 4 : SmartAudio - controls video transmitter via Crossfire LUA scripts on TX16S transmitter - RC channel 8 is set to output Crossfire LQ/RSSI as signal, flight controller reads channel 8 for RSSI in video overlay TX1811 800mw 5.8 GHz video transmitter - SmartAudio is connected to Crossfire receiver to allow video transmitter control from TX16S transmitter uBlox GPS Cyclops camera/DVR gets power from a 5V regulator (replaced 12V camera shown in photo) LC filter for power to flight controller/OSD, camera, and video transmitter for clean video
|
|
VTOL, helicopters, and multi-rotors.
   |
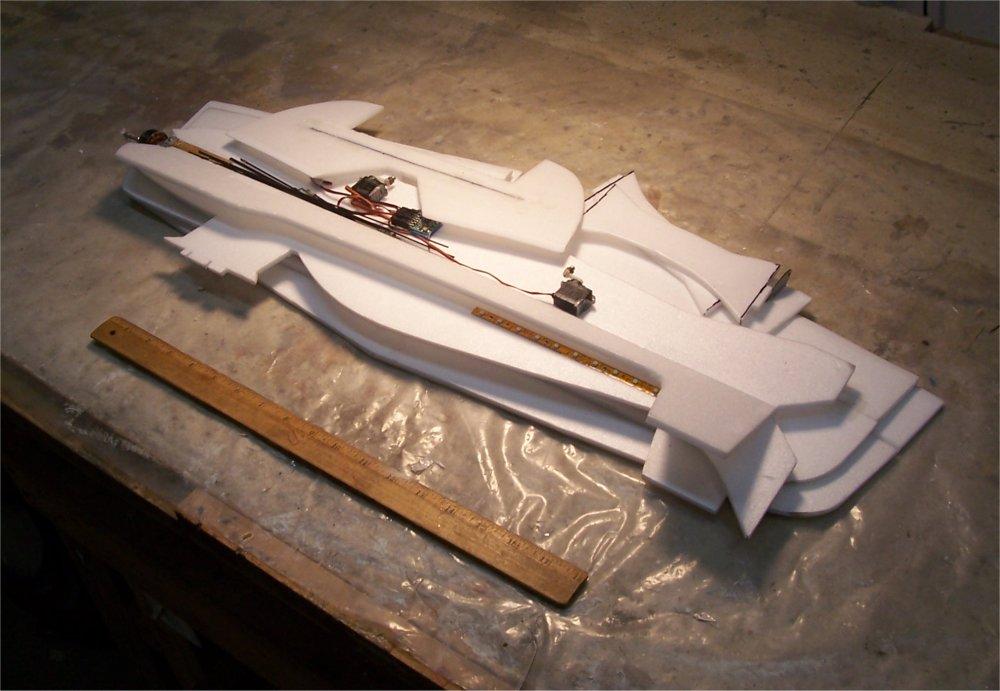
6 Foot Wingspan Pink Wing VTOL Tri-copter - This flying wing takes off hovering like a tri-copter, the front motors tilt down slowly as the wing picks up speed, and it transitions to forward flight. Landing is done by gliding or reversing the transition steps and hovering down. This page has the details on the airframe and avionics development. FLYING in HOVER - working - hover video @ YouTube FLYING in FORWARD FLIGHT - working - hover & forward flight video @ YouTube, on-board video of forward flight @ YouTube TRANSITION from HOVER to FORWARD FLIGHT - in work front : Neo 450 880kv outrunner motor (x2) front : HobbyKing 30A ESC, Dynam 25A ESC - SimonK firmware installed via USBASP & Atmega socket tool rear : Turnigy 3536 910kv outrunner motor rear : HobbyWing Skywalker 40A ESC - BlHeli firmware installed using Arduino Nano as programmer KK 2.1 flight controller with Steveis 1.19 for hover flight, OpenAero VTOL for transitioning flight two standard servos for elevons, two high-torque servos for front and rear motor tilt mechanisms Orange 618XL 6ch DSMX receiver with PPM output to KK 2.1 flight controller |
||||||||||||||||||||||||||||||
 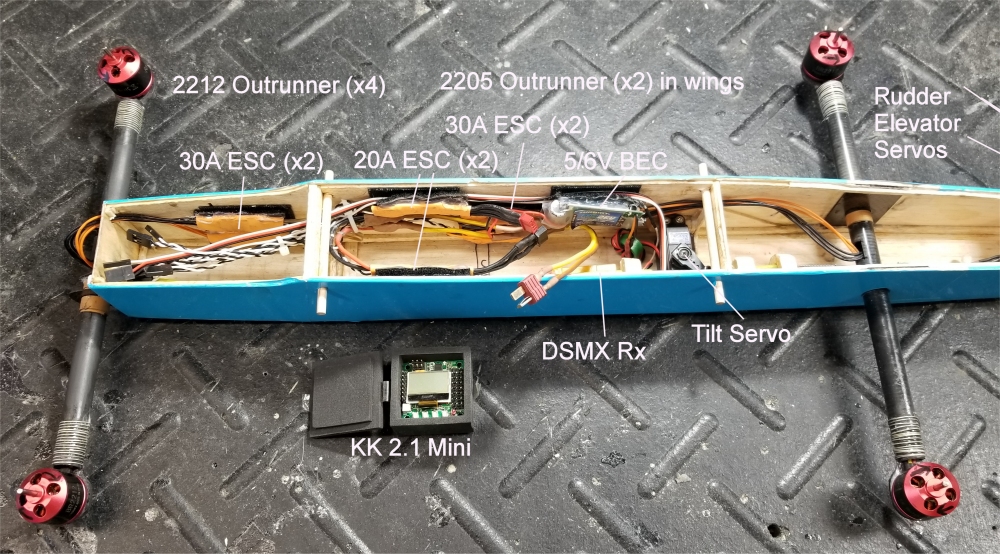    |
Electra VTOL Hexacopter - I built this Electra kit to be a VTOL electric glider, with four motors on the fuselage that are vertical for takeoff and landing, and rotate to horizontal for forward flight. There are also two fixed motors in the wings that are just for vertical lift and roll control. A KK 2.1-mini running OpenAero VTOL software is the flight controller, and the RC control is via a 6 channel DSMX receiver with PWM & PPM outputs. All the electronics are installed internal to the fuselage. Under Construction Tilt motors on fuselage - 2212 outrunners (x4), 30A ESC (x4) Fixed motors in wing - 2205 outrunners (x2), 20A ESC (x2) KK 2.1 Mini Flight Controller - OpenAero VTOL software, drives 6 ESCs & tilt servo Orange 618XL 6ch DSMX receiver with PPM output - PPM --> KK 2.1 Mini Flight Controller - aileron PWM --> rudder servo - elevator PWM --> elevator servo 6V switching regulator for power to Rx, KK 2.1, servos |
||||||||||||||||||||||||||||||
  |
Align T-Rex 450 CCPM Helicopters (x2) - I have two 450 size T-Rex helicopters. Two of the helicopters and the Airwolf fuselage in the photos were sold. Brushless motor, 40 amp ESC, Futaba GY401 / HK 401B gyro, DSMX Rx, five channels[mixed cyclic/collective (3 servos), rudder(1 servo), throttle(ESC)] FLYING |
||||||||||||||||||||||||||||||
    |
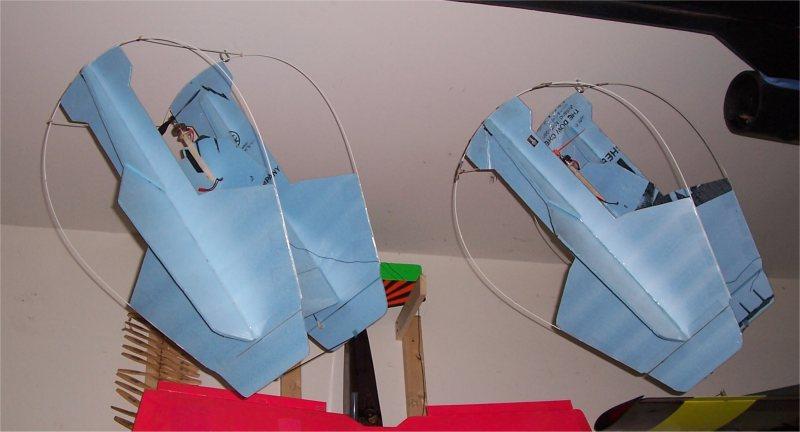
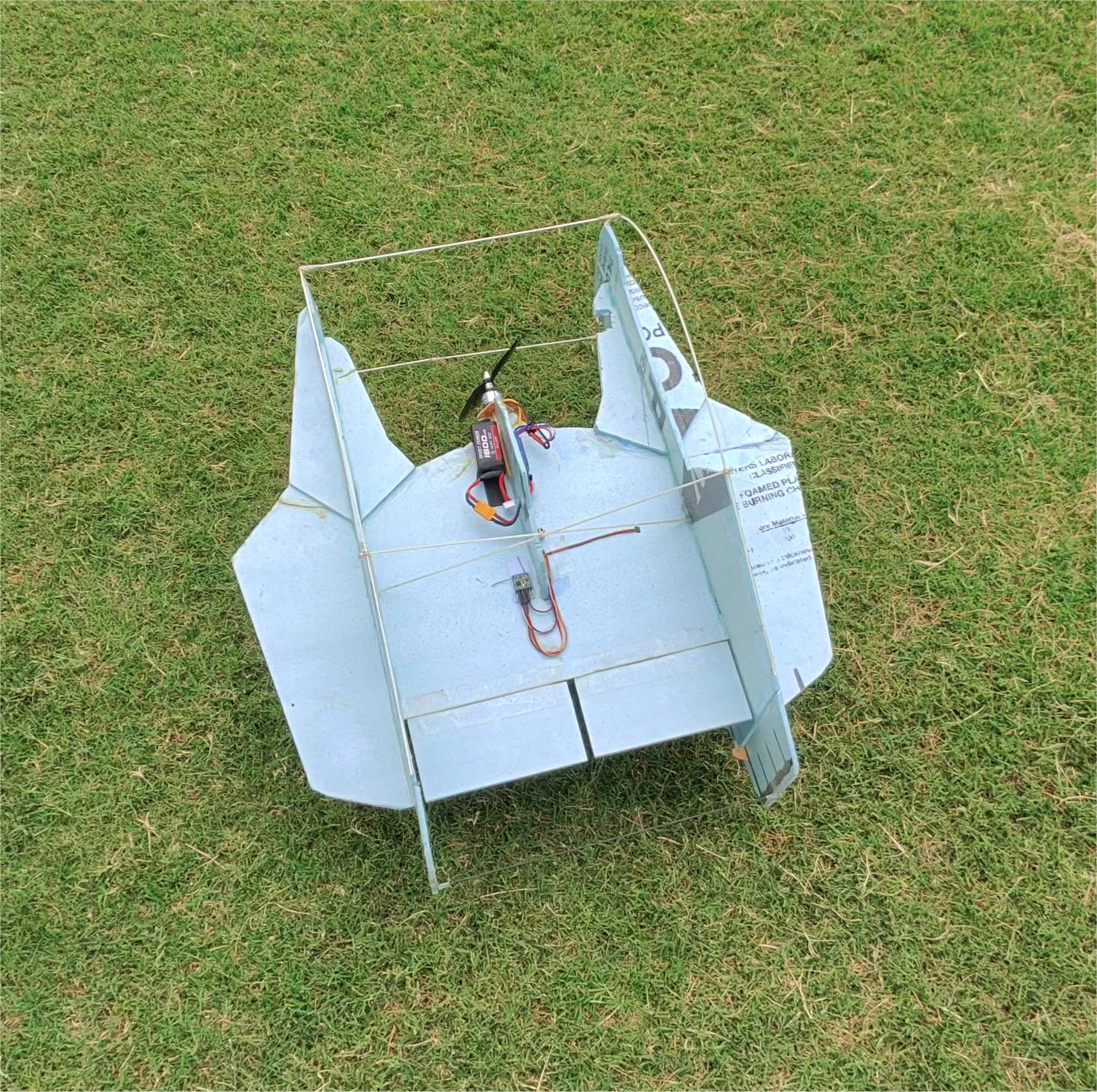
Photos in flight here, and here. Videos at YouTube here and here from 2008. This VTOL aircraft is still flying 9 years later; here is some video from October 2017. I added LEDs in 2024; here is some video from June 2024 with the LEDs. Version #5 is a cleaned up copy of version #4, with new motors and extra bracing between the four surfaces. I originally had twin counter-rotating KB20-40-15L brushless motors and HE20 gearboxes, but replaced those with two KD A22-20L outrunners with 20A ESCs, and then later with some smaller KD outrunners. The four independent surfaces are controlled by four HXT900 servos. Video at YouTube here. Photo in flight here. - FLYING Versions 4 and 5 were upgraded with individual gyros and custom mixers for stability. See this page for the required gyro modifications and home-made mixers. I simplified the control mixing and eliminated electronics by removing the individual gyros and custom mixers. Versions 4 and 5 both now use DSMX three axis stabilized receivers with the outputs going to mixers: roll + pitch -> left and right surfaces, roll + yaw -> top and bottom surfaces, throttle -> both ESCs, gear switch -> stabilizer on/off. With this setup, a roll command causes all four control surfaces to deflect. A pitch command causes the two pitch surfaces to deflect, and a yaw command causes the two yaw surfaces to deflect. The gains are tuned for hover to slow forward flight speeds. At high speeds, the gyros are turned off to avoid ringing. |
||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||
   |
Brushless speed controls have advanced from standard ESCs to custom made ESCs with special software made specifically for very fast update rates from the flight controllers. The latest multi-rotor ESCs do not have BECs, so they are smaller and allow the wiring and board layouts to be reduced. I have a socket flashing tool used with a USBASP for Atmel based ESCs and OSDs, which I have used to flash various firmwares. I also have an Arduino Nano programmed as a flashing tool for SiLabs and Atmel based ESCs, which I have used to flash BlHeli firmware. The two main firmware packages available for multi-rotors are SimonK and BlHeli: SimonK - https://github.com/sim-/tgy (ATmega8) BlHeli - https://github.com/bitdump/BLHeli (BlHeli = ATmega8 & SiLabs gen1, BlHeli-S = SiLabs gen2, BlHeli-32 = gen3) There are various communication protocols that are used to control an ESC. Standard PWM, also used to control servos, is a pulse that is 1000 to 2000 μs long. At 2000 μs, the maximum update rate is theoretically 500 hz, but because of the delay required between pulses, the maximum update rate for PWM works out to about 450 hz. Oneshot125 is a pulse that is 125 to 250 μs long, or 1/8 the size of a standard PWM pulse, and will allow an update rate of slightly less than 4000 hz. See here for more details on OneShot125. Multishot is 5 to 25 μs long, or 1/10 the size of OneShot125. DShot is a digital protocol, and runs at several speeds. DShot can also be bi-directional, so the ESC can send motor data to the flight controller to be used for adjustable filters. While most newer ESCs may have he proper microcontrollers to support the latest BlHeli-S firmware and DShot protocol, the control path must also be compatible; capacitors on some ESC inputs negate a digital protocol and these tiny surface mount capacitors must be removed to allow the digital data to be transmitted. The latest SimonK version, 2015-09-12, supports OneShot125. See tgy.asm source code, line 214, for the details. The source code for SimonK shifts the PWM input counter 3 bits, which results in 8x the original size of a OneShot125 pulse to fit with normal PWM processing. BlHeli supports OneShot125 and newer versions of BlHeli-S and BlHeli32 also support MultiShot and DShot, which are faster protocols than OneShot125. I use OneShot125 as a minimum in all my multi-rotors using BetaFlight or iNav. DShot and Multishot are supported with the newer ESCs flying with F3 or better flight controllers. BlHeli-S JazzMaverick 16.73 and BlHeli-32 also support bi-directional telemetry DSHOT, which allows for engine RPM and other data to be passed from the ESC to the flight controller, allowing for specific notch filters to be applied to RPM-associated vibrations. |
||||||||||||||||||||||||||||||
|
Line of Sight (LOS) Multi-Rotors |
|||||||||||||||||||||||||||||||
 |
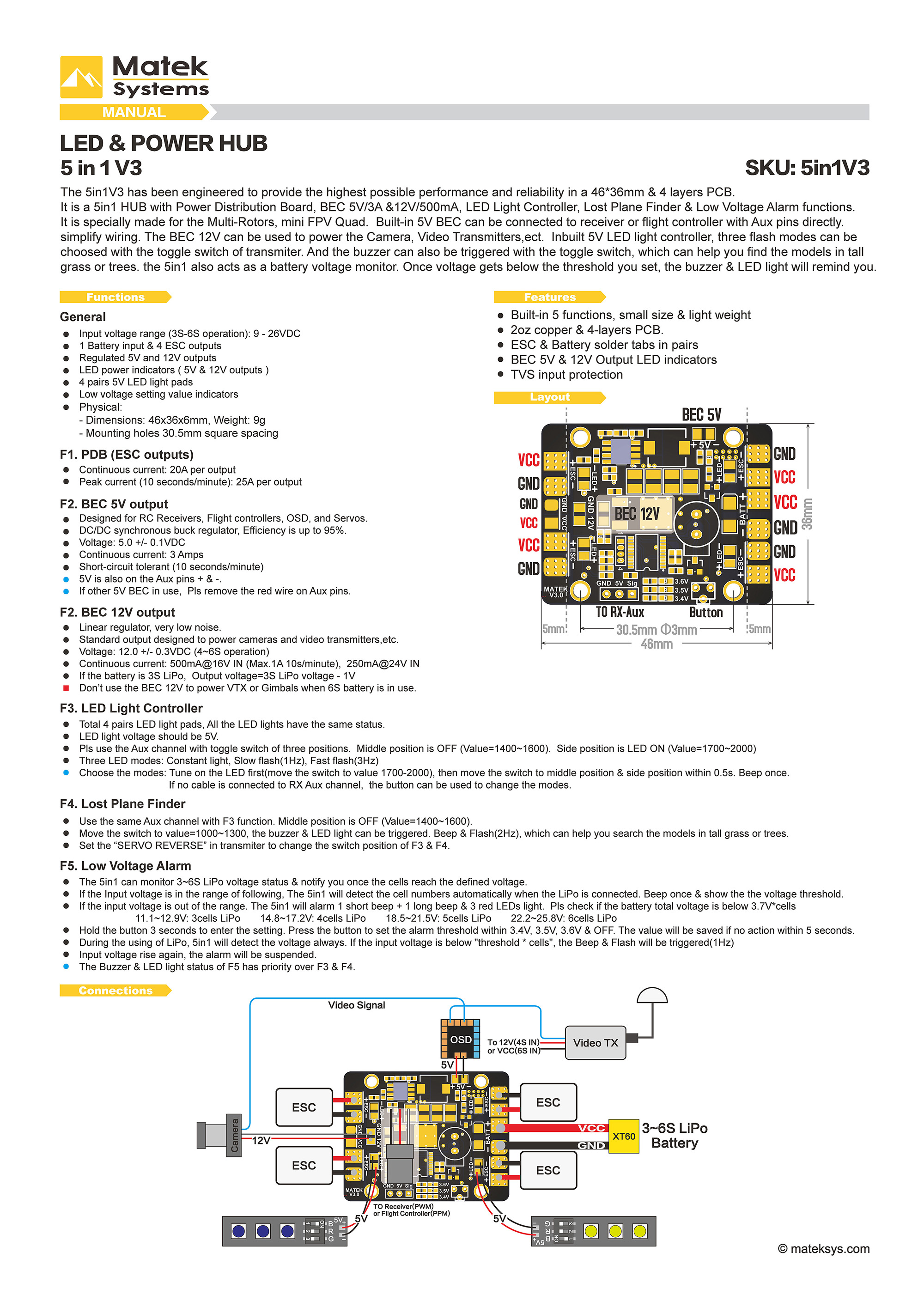
Quadcopter 18" 4225 - The combination of these giant propellers, very efficient motors, and light weight all-carbon fiber frame makes this a long duration quadcopter. FLYING - LOS Homemade carbon fiber frame, 18" across diagonally from motor to motor Afroflight Naze32 F1 flight controller, 5V input - flashed and configure BetaFlight 3.1.7 via USB Orange 618XL 6ch DSMX PPM+PWM Receiver Multistar 4225-390kv motor x4 (runs on 6S) XRotor 2-6S ESC (x6), no BECs - BlHeli 14.9 firmware installed via USBASP & Atmega socket tool - configured BlHeli via flight controller pass-through Matek LED & power hub, provides 5V to FC, buzzer and 5V LED controller built in (manual) - 5V waterproof LED strips on each arm, buzzer and LEDs controlled via PWM channel 6 |
||||||||||||||||||||||||||||||
 |
Quadcopter 17" 4008 - The combination of these giant propellers, very efficient motors, and light weight all-carbon fiber frame makes this a long duration quadcopter. FLYING - LOS Homemade carbon fiber frame, 17" across diagonally from motor to motor Afroflight Naze32 F1 flight controller, 5V input - flashed and configure BetaFlight 3.1.7 via USB Orange 618XL 6ch DSMX PPM+PWM Receiver FPVManuals NX4008-620kv motor x4 (runs on 4S) ESC 2-4S x4 - BlHeli 14.9 firmware installed via USBASP & Atmega socket tool - configured BlHeli via flight controller pass-through Matek LED & power hub, provides 5V to FC, buzzer and 5V LED controller built in (manual) |
||||||||||||||||||||||||||||||
|
First person view (FPV) multi-rotors |
|||||||||||||||||||||||||||||||
   Old servo gimbal   Crossfire Rx |
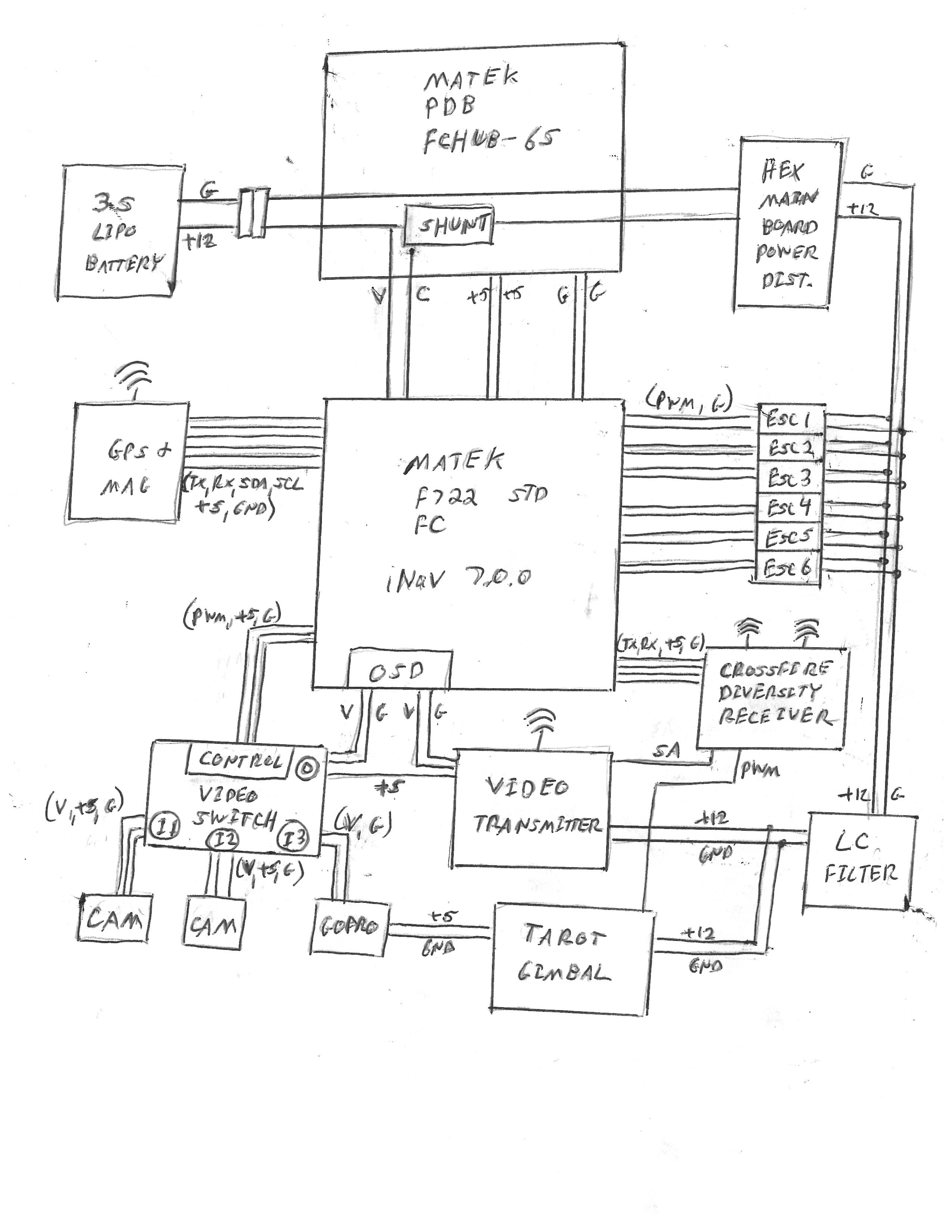
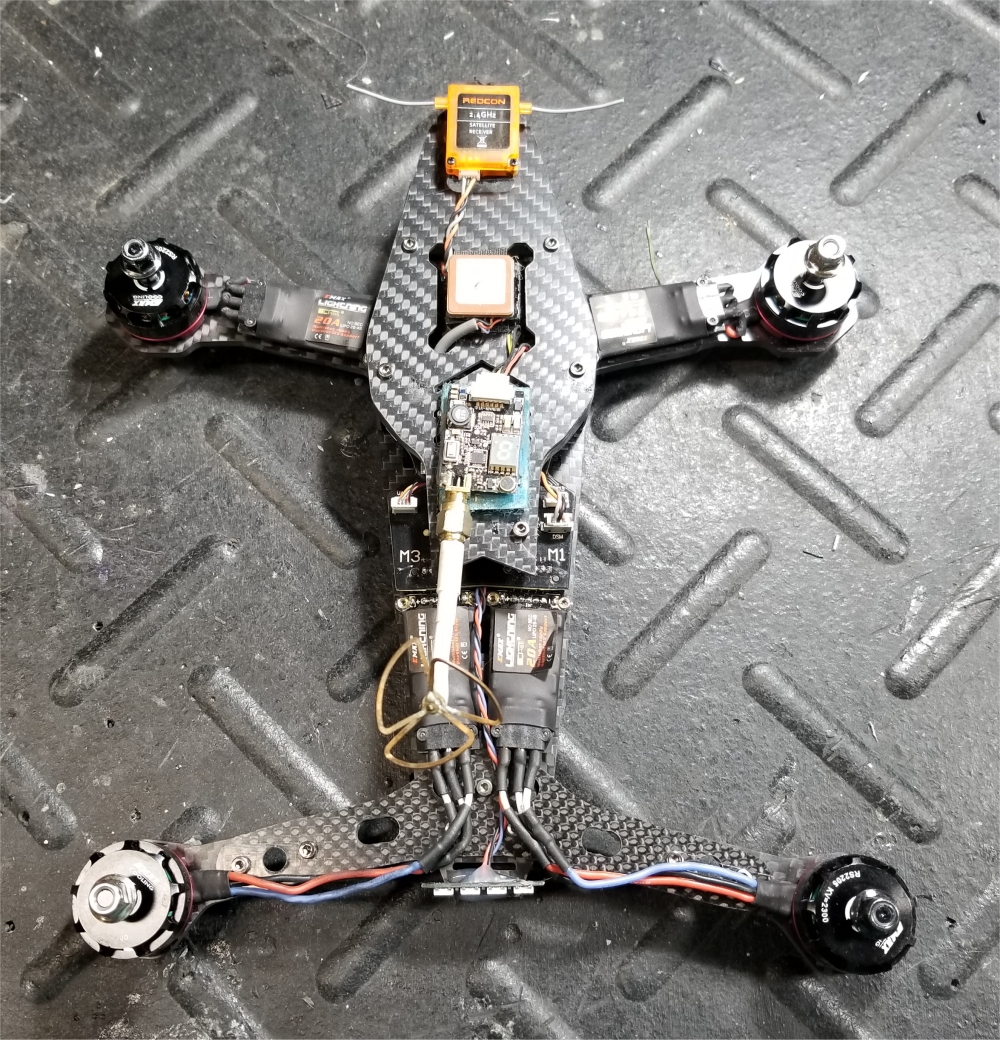
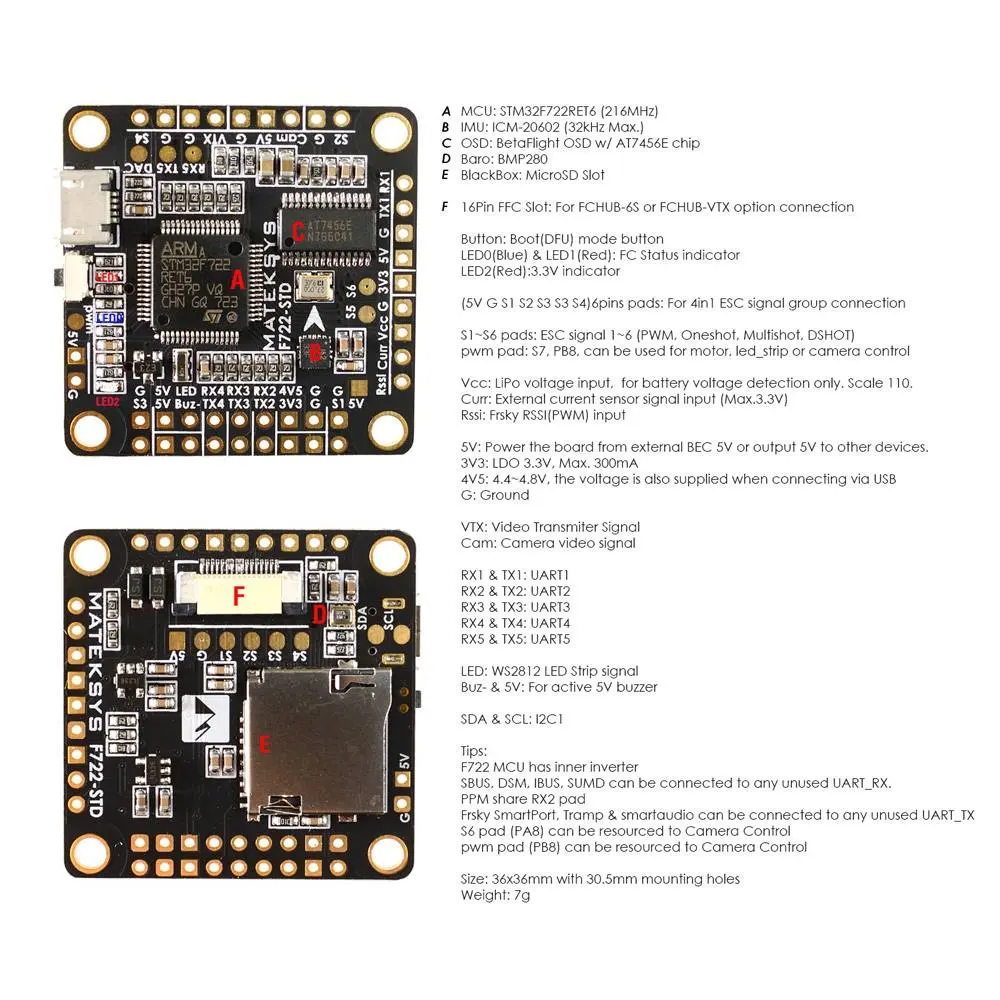
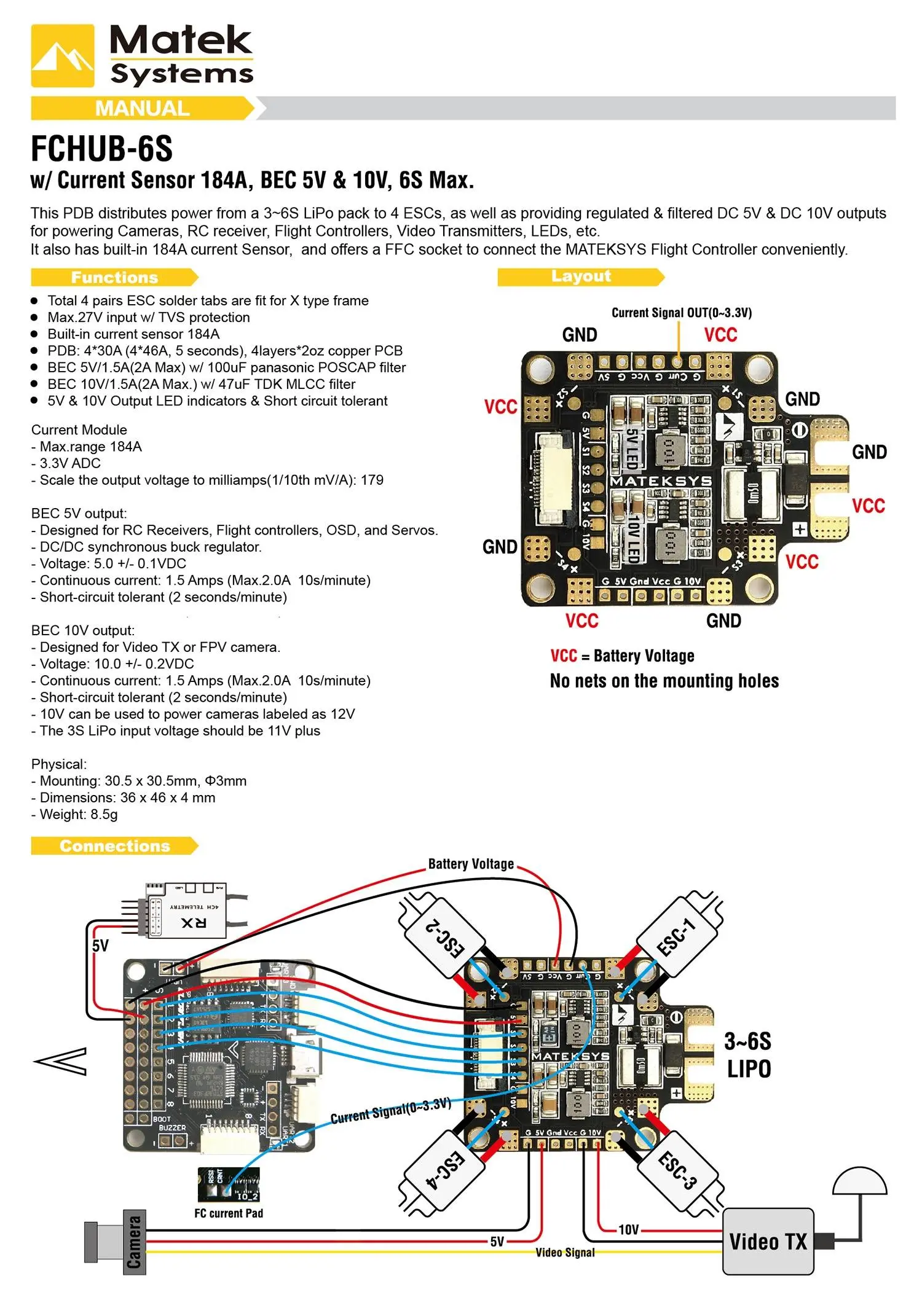
Hexacopter with Camera Gimbal - This originally flew with a KK 2.1 hardcase flight controller to test out the motors, ESCs, and frame. It now has a Matek F722 STD flight controller running iNav 7.0.0, with a uBlox 7 GPS receiver and magnetometer. The Matek F7 FC has 7 PWM outputs; PWM 1 - 6 (OneShot125) control the ESCs, and PWM 7 controls the video switch. The Tarot 2 axis brushless gimbal is independently stabilized in roll and pitch, with additional manual pitch control received directly from the Crossfire receiver. The gimbal holds a GoPro Hero 3. There are also two fixed 5V cameras and a video switch to allow selection of three different views: gimbal stabilized GoPro / fixed camera - front / fixed camera - rear. The video transmitter and gimbal are powered from the main battery through an LC filter, the control avionics are powered from a Matek PDB paired with the Matek F7 flight controller, the GoPro is powered from a dedicated 5V supply on the gimbal control board, and the fixed 5V cameras are powered by a 5V supply on the video transmitter. FLYING - FPV
|
||||||||||||||||||||||||||||||
 |
Hexacopter 2205 #1 & Hexacopter 2205 #2 - HobbyKing had a great deal for $5 each on 2205-2350 motors with 30A ESCs built in. I bought enough of these motor + ESC combinations to build two hexacopters, and I had a couple spares left over for another project. By hunting for special deals at various on-line stores, I was able to keep the total cost for these racing and acrobatic hexacopters with full FPV at less than $90 each. FLYING - FPV Spedix 250 hexacopter frame Flip32 F1 flight controller all-in-one (AIO), MWOSD 2.0 SW - barometric pressure sensor for altitude - current and voltage sensors - flashed and configured Betaflight 3.1.7 via USB - uplink commands from DSMX receiver via PPM - COM1: MWOSD (shared with USB) - flashed and configured MWOSD 2.0 via USB with MWOSD 2.0 Configurator Multistar Elite 2205-2350 motor with built in 30A ESC CW (x3) Multistar Elite 2205-2350 motor with built in 30A ESC CCW (x3) - configured ESCs with BlHeli via FC pass-through Orange 617XL DSMX PPM Receiver Eachine TX526 25/200/600mW 5.8GHz video transmitter 1000 TVL camera GEP power distribution board LC filter, supplies power to flight controller, video transmitter, camera |
||||||||||||||||||||||||||||||
   |
Pentacopters 2205 #1 and Pentacopter 2205 #2 - This is a regular QAV 250 quad frame with a fifth motor on the back acting as a pusher. This allows the quad to fly forward in level pitch with hover power on the four main motors, with the rear motor providing the forward thrust. I have the frame turned upside down to keep the four main motor props up high, away from the rear pusher prop which I have mounted low. FLYING - FPV QAV 250 carbon fiber frame Afro CC3D F1 flight controller with 4-in-1 20A ESC, 3-4S input, manual - flashed BetaFlight 3.1.7 with FTDI serial adaptor on flight controller COM1 - configured BetaFlight via USB - configured ESCs with BlHeli via FC pass-through - uplink commands from DSMX receiver via PPM Racerstar 2205-2300 motor (x4) - vertical lift Multistar Elite 2205-2350 motor with built in 30A ESC - rear motor as pusher for forward flight Orange 617XL DSMX PPM Receiver - channel 5 : arm/disarm + flight modes - channel 6 : motor #5 (pusher) MicroMinim OSD - flashed and configured MWOSD 2.0 via FTDI with MWOSD 2.0 Configurator Eachine TX526 25/200/600mW 5.8GHz video transmitter 1000 TVL camera LC filter, supplies power to video transmitter + camera + OSD |
||||||||||||||||||||||||||||||
 |
Long Range 10" Quadcopter - FLYING - FPV Homemade carbon fiber 10" frame - GoPro 3D printed mount - 10x7 propellors Aikon F7 V2 Flight Controller Beitian BN-220 GPS receiver Racestar 35A BlHeli-S 4-in-1 ESC, DSHOT 600 for control, firmware J-H-15, pinout - reflashed with bi-directional telemetry DSHOT BlHeli-S JazzMaverick 16.73 via flight controller pass-through Emax MT3506 650kv motors (x4) - make sure to set the motor data correctly for RPM filters; 3506 motors = 14 poles Crossfire Diversity Nano Rx - use TBS LUA scripts to configure Rx output channels - Rx channel 1 & 2 : long range uplink control and telemetry downlink Runcam Split V2 - 1080P 60FPS HD video recorder on-board Eachine TX1200 5.8GHz Video Transmitter, manual - controlled via SmartAudio from flight controller LC filter, supplies power to video transmitter + Runcam camera |
||||||||||||||||||||||||||||||
  |
Hyperlow 5" Quadcopter - FLYING - FPV Hyperlow 5" frame DYS (Omnibus) F4 flight controller, 3-6S input, schematic #1 (Rx3/Tx3 incorrect), schematic #2 (Rx3/Tx3 correct) - flashed & configured with BetaFlight and BetaFlight OSD via USB Beitian BN-180 GPS receiver EMax RS2306 2750kv motors (x4) - make sure to set the motor data correctly for RPM filters; 2306 motors = 14 poles HAKRC 35A BLHeli-32 ESC (x4) - updated and configured with latest BlHeli-32 firmware via flight controller pass-through - BlHeli-32 supports bi-directional telemetry DSHOT Crossfire Sixty9 Receiver & 5.8 GHz Video Transmitter - use TBS LUA scripts to configure Rx output channels - Rx channels 1 & 2: long range uplink control and telemetry downlink - built-in video transmitter is controlled via Crossfire LUA scripts Runcam Split Mini 2, camera + HD DVR @ 1080P 60fps LC filter, supplies power to video transmitter + Foxeer camera |
||||||||||||||||||||||||||||||
 |
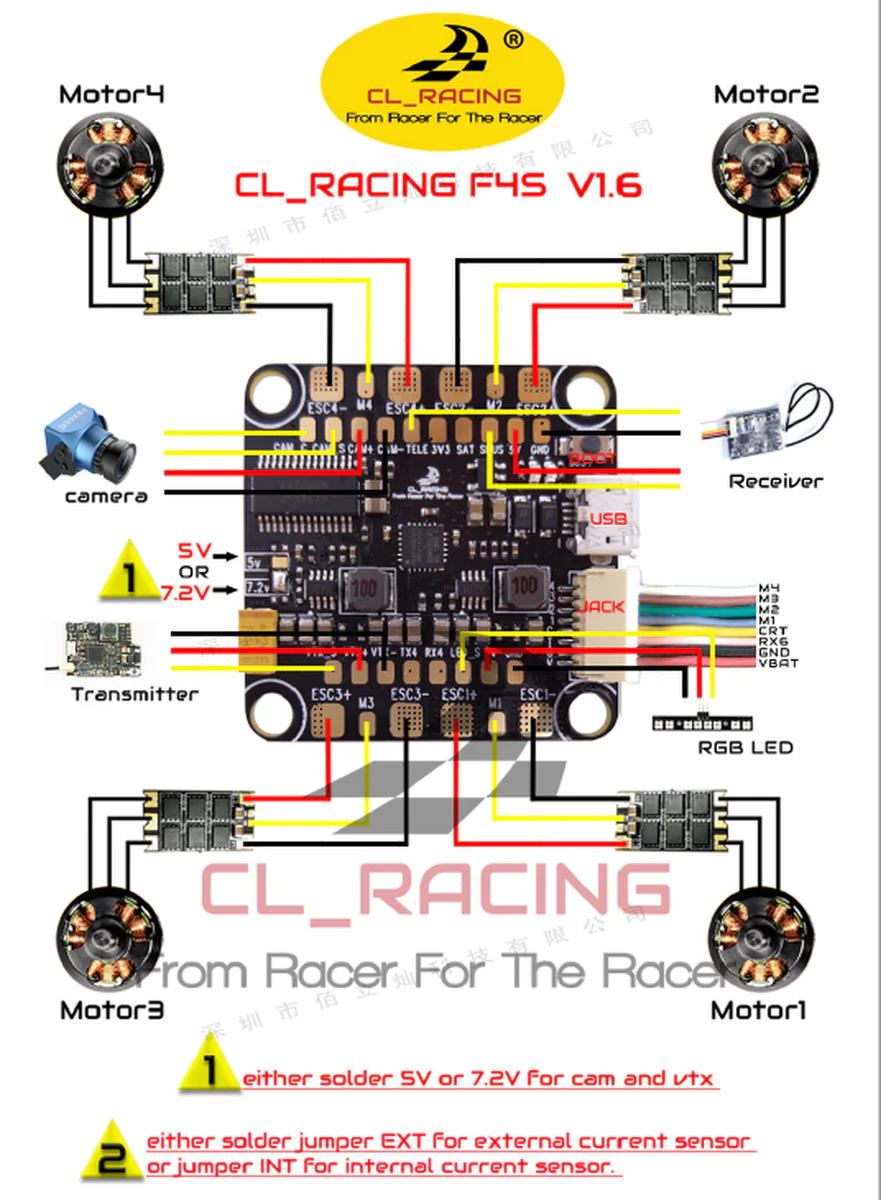
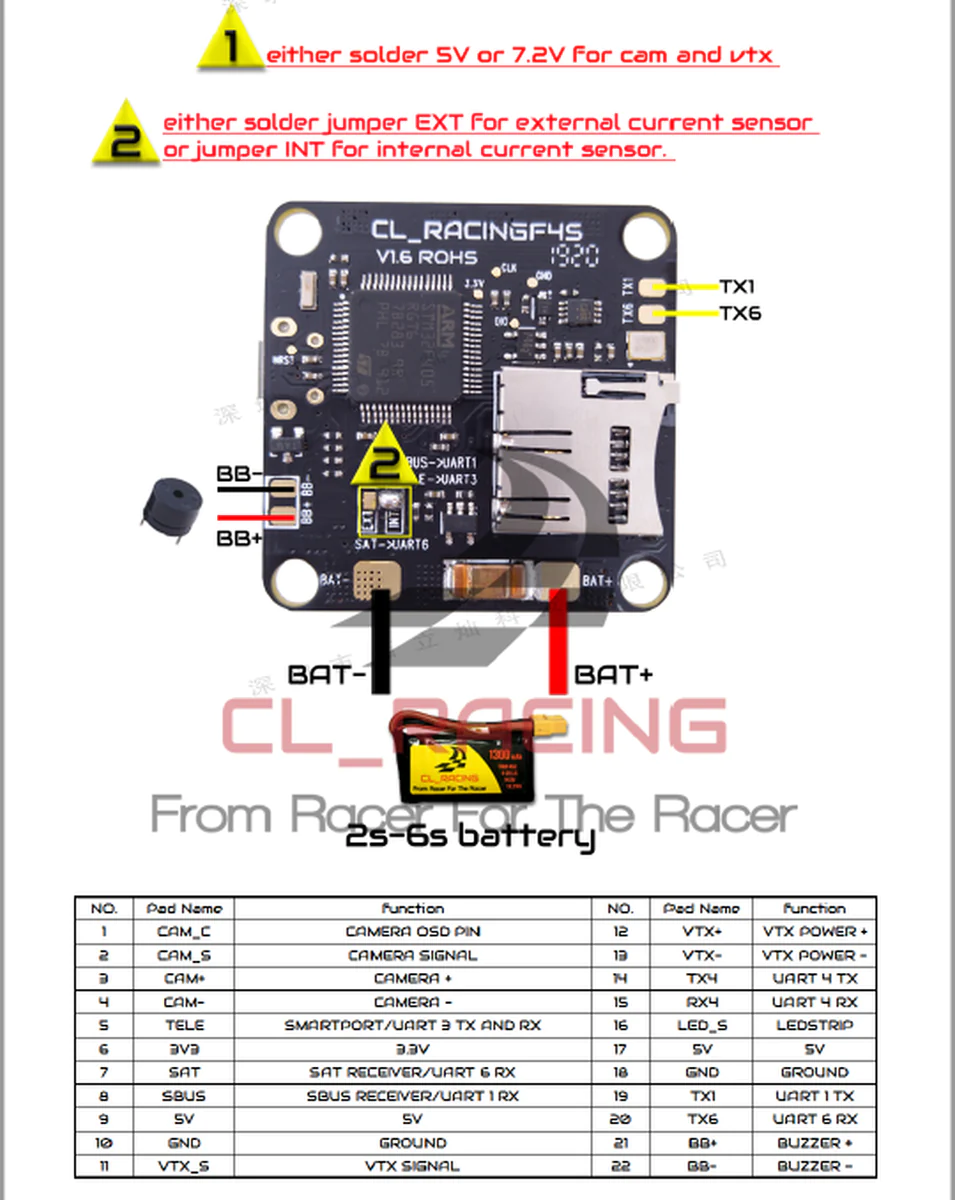
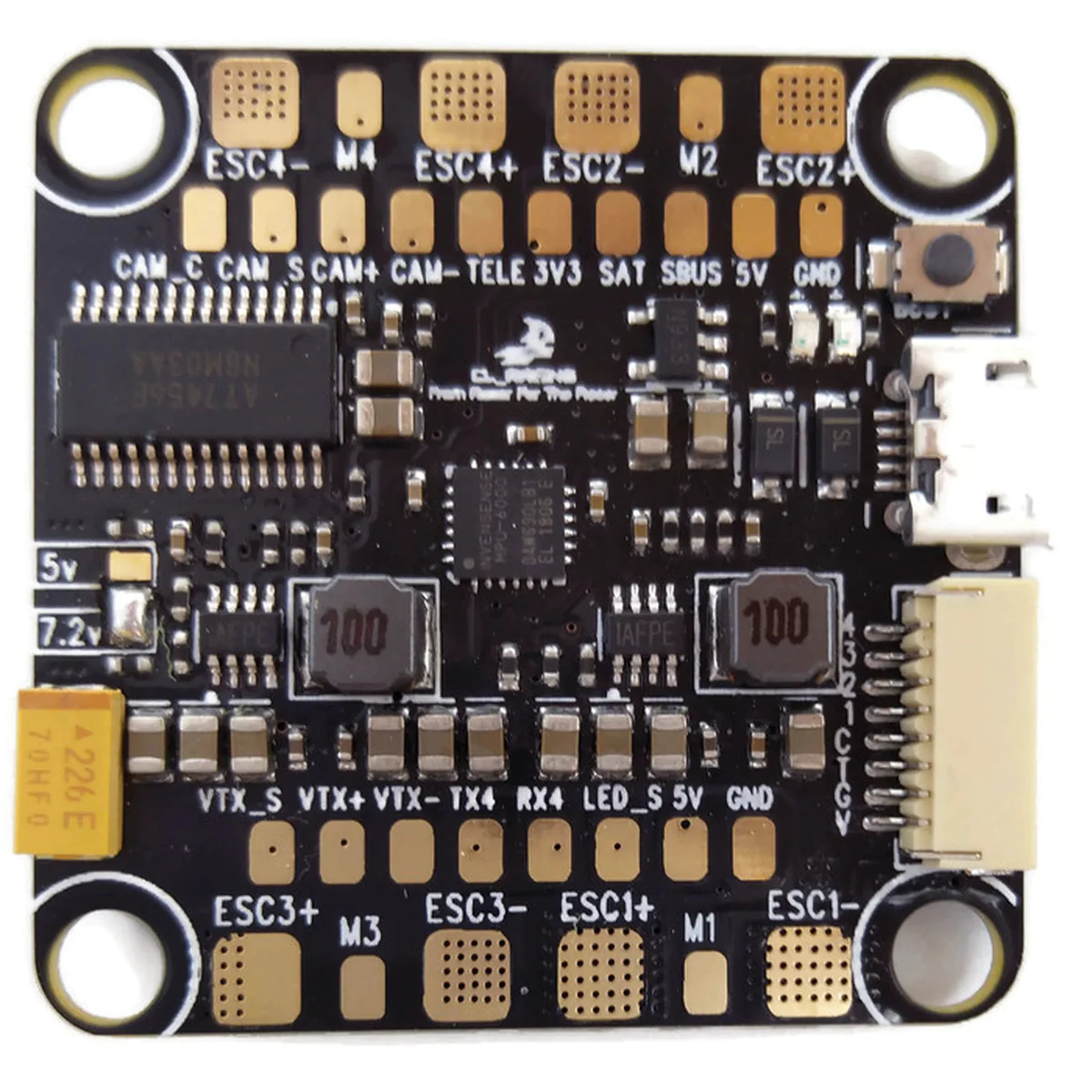
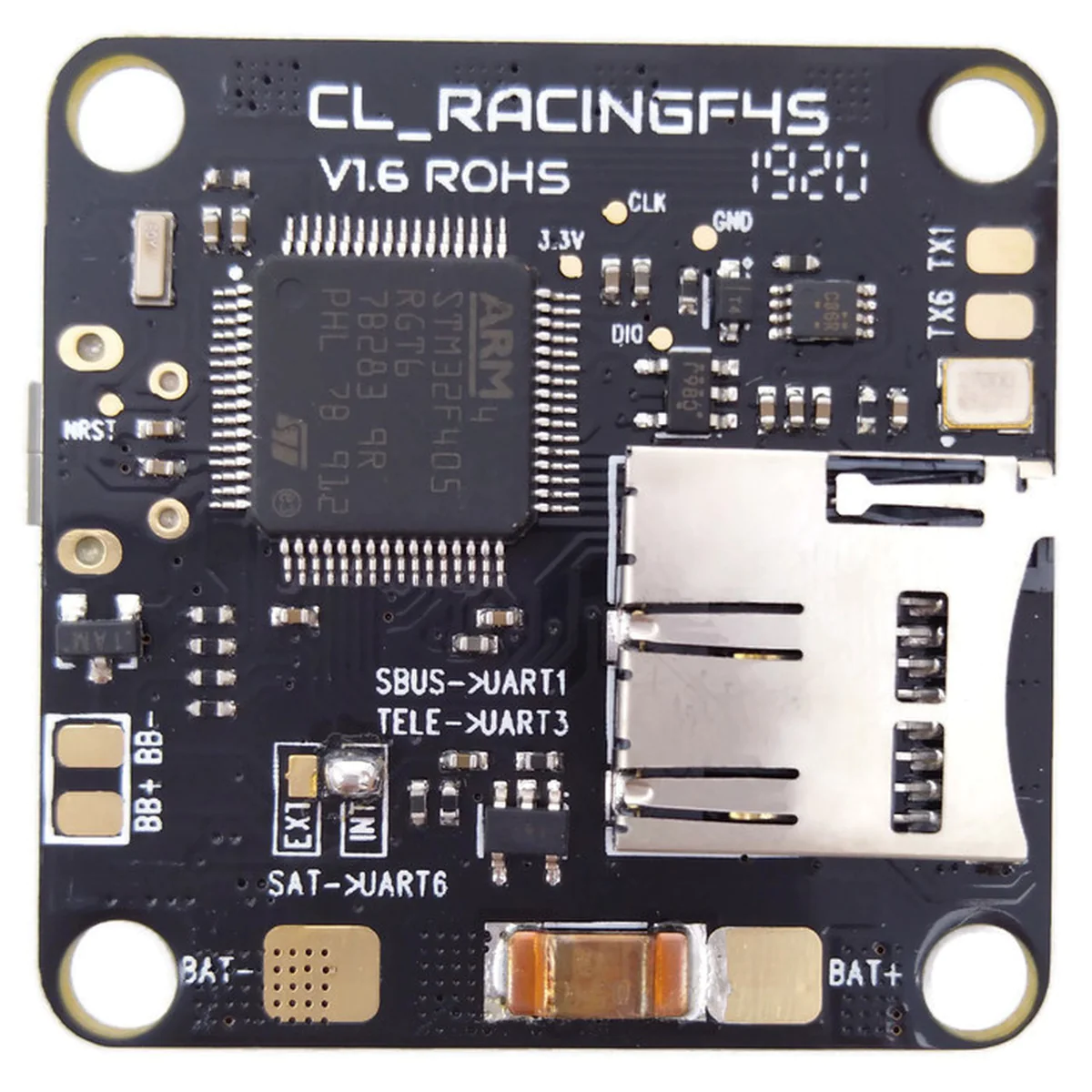
FPV Cycle Glide 5" Quadcopter - FLYING - FPV FPVCycle Glide 5" frame CL Racing F4S V1.6 flight controller, 2-6S input, image 1 / image 2 / image 3 / image 4 / all - flashed & configured with BetaFlight and BetaFlight OSD via USB Beitian BN-180 GPS receiver Emax 2204 - 2300kv motors (x4) - make sure to set the motor data correctly for RPM filters; 2306 motors = 14 poles LittleBee and Emax 20A BlHeli-S ESC (x4), DSHOT 600 for control, firmware X-XX-XX - reflashed with bi-directional telemetry DSHOT BlHeli-S JazzMaverick 16.73 via flight controller pass-through Crossfire Nano Receiver - use TBS LUA scripts to configure Rx output channels - Rx channels 1 & 2: long range uplink control and telemetry downlink - Rx channel 4: SmartAudio - controls video transmitter via Crossfire LUA scripts on TX16S transmitter Caddx Loris 4K HD Camera - pinout - set to record at 4K 30FPS AKK FX3 25-600mw 5.8 GHz Video Transmitter, pinout - SmartAudio is connected to Crossfire receiver to allow video transmitter control from TX16S transmitter LC filter, supplies power to FC + video transmitter + Runcam Split Mini 2 Read here for problems found with SD card for BetaFlight Blackbox recordings when using FAT16 versus FAT32. |
||||||||||||||||||||||||||||||
 |
Floss 5" w/ Carbon Fiber Props - FLYING - FPV Micro F3 Flight Controller w/ DSMX receiver & 4x20A ESC (20 mm x 20 mm) - flashed and configured BetaFlight 3.2.3 via USB - built-in DSMX receiver on main board; range is terrible so this has been turned off - special resource setup to allow external receiver : see here for details - 20 Amp 4-in-1 ESC on second board - two receiver configurations have been flown: - Crossfire Nano Receiver via UART2 TX/RX resource change - Orange 617XL DSMX PPM Receiver via LED_STRIP resource change (active) Eachine 600mw 5.8 GHz Video Transmitter Runcam Racer camera, with voltage + timer OSD 1804 motors, 5x3 carbon fiber props Floss 5" w/ Three Bladed Props - FLYING - FPV Micro F3 Flight Controller w/ DSMX receiver & 4x20A ESC (20 mm x 20 mm) - flashed and configured BetaFlight 3.2.3 via USB - built-in DSMX receiver on main board; range is terrible so this has been turned off - special resource setup to allow external receiver : see here for details - 20 Amp 4-in-1 ESC on second board - two receiver configurations have been flown: - Crossfire Nano Receiver via UART2 TX/RX resource change - Orange 617XL DSMX PPM Receiver via LED_STRIP resource change (active) Eachine 600mw 5.8 GHz Video Transmitter Mista Micro camera 1806 motors, three bladed props |
||||||||||||||||||||||||||||||
 |
Reptile Cloud 149mm Quadcopter - FLYING - FPV Reptile Cloud 149mm Cinewhoop frame Omnibus F4 Micro flight controller, 3-6S input, pinout - flashed & configured with BetaFlight 4.4.3 and BetaFlight OSD via USB - must use cloud compile of BetaFlight with AKK SmartAudio fix to control Eachine TX5258 video transmitter from flight controller - UART1 Tx : Spektrum 4649T receiver - UART3 Tx : SmartAudio control of Eachine TX5258 video transmitter - Switch on TX16S instantly sets low/medium/high power - Connection to TX3 requires very precise solder to pin B10, ARM F405 pinout - Could also have used SoftSerial and resource change for LED control pad RacerStar 1407 3500kv motors (x4) - make sure to set the motor data correctly for RPM filters; 1407 motors = 12 poles Spedix IS20A 20A BlHeli-S 4-in-1 ESC, DShot 600 for control, firmware G-H-15 - reflashed with bi-directional telemetry DSHOT BlHeli-S JazzMaverick 16.73 via flight controller pass-through Spektrum 4649T telemetry receiver - Spektrum 2048/SRXL control, SRXL telemetry - enable RSSI on spare channel in BetaFlight receiver tab, RSSI will be passed to flight controller as PWM Eachine TX5258 800mw 5.8 GHz Video Transmitter - SmartAudio has bug and is not fully compliant with TBS SA protocol, use SA fix in BetaFlight cloud compile Runcam Split Mini, camera + HD DVR @ 1080P 60fps LC filter, supplies power to FC + video transmitter + Runcam Split Mini |
||||||||||||||||||||||||||||||
  |
Hobbymate 130mm Quadcopter - FLYING - FPV Hobbymate X130 carbon fiber frame Omnibus F4 flight controller AIO, 3-6S input, pinout - flashed & configured with BetaFlight 4.4.3 and BetaFlight OSD via USB - must use cloud compile of BetaFlight with AKK SmartAudio fix to control AKK X2 video transmitter from flight controller - UART1 Tx : Spektrum 4649T receiver - UART3 Tx : SmartAudio control of AKK X2 video transmitter - Switch on TX16S instantly sets low/medium/high power Hobbymate 1306 motors - make sure to set the motor data correctly for RPM filters; 1306 motors = 12 poles Hobbymate 20A BlHeli-S ESC (x4), DShot 600 for control, firmware C-H-20 - reflashed with bi-directional telemetry DSHOT BlHeli-S JazzMaverick 16.73 via flight controller pass-through Spektrum 4649T telemetry receiver - Spektrum 2048/SRXL control, SRXL telemetry - enable RSSI on spare channel in BetaFlight receiver tab, RSSI will be passed to flight controller as PWM AKK X2 800mw 5.8 GHz Video Transmitter - SmartAudio has bug and is not fully compliant with TBS SA protocol, use SA fix in BetaFlight cloud compile Runcam Split 3 Nano, camera + HD DVR @ 1080P 60fps LC filter, supplies power to video transmitter + Runcam Split Nano |
||||||||||||||||||||||||||||||
|
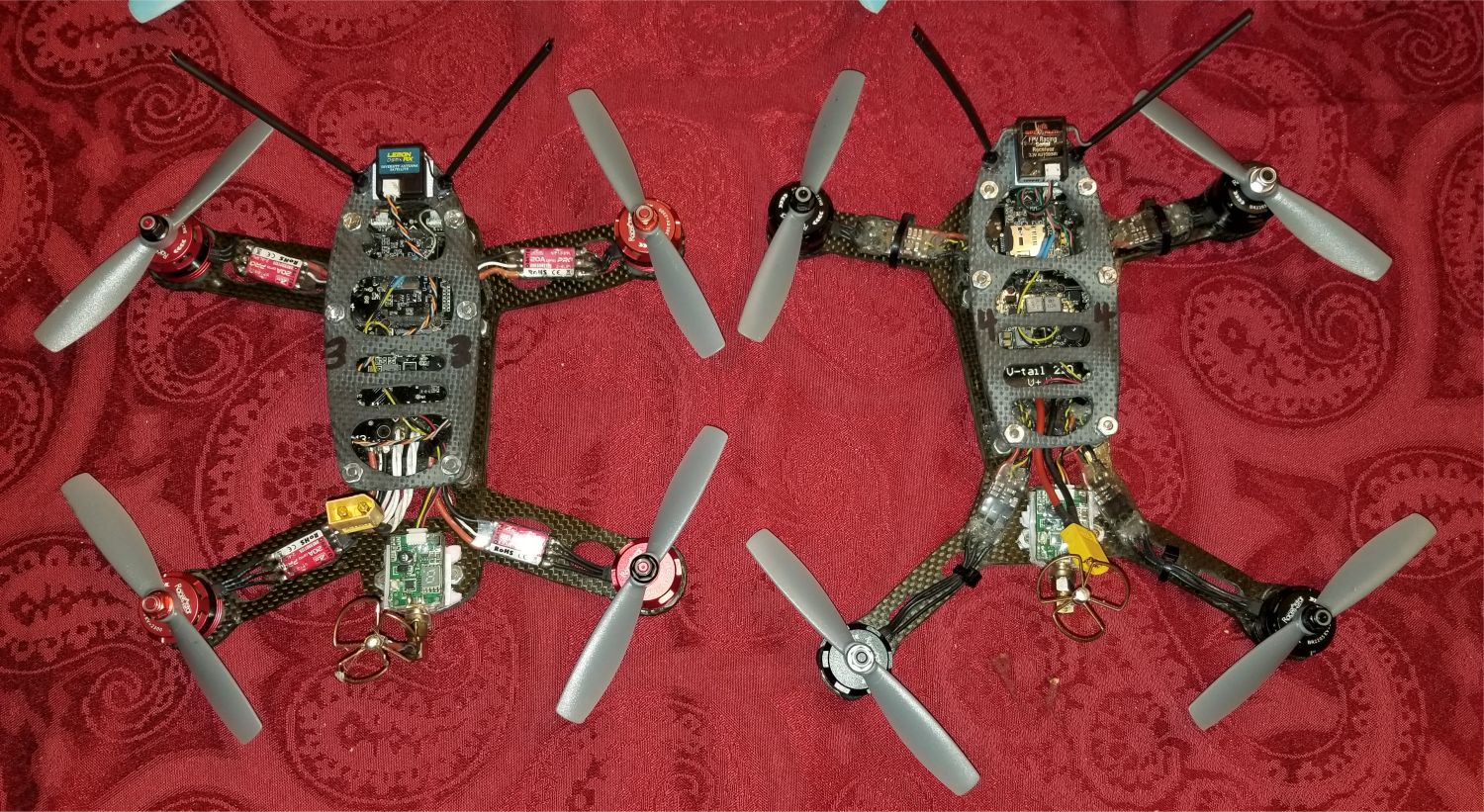
Eachine V-Tail 210 Quadcopter #1 - #5 - Banggood had a great sale for this quadcopter; it was $72 for everything to fly except the receiver, and that even included a 2-4S charger. This airframe has several issues in its stock configuration, including the problem that the v-tail assembly breaks easily. I made several changes, posted in detail here to RCGroups. I removed the plastic v-tail assembly and extended the arms with carbon fiber to make a standard flat X platform without the v-tail. I removed the camera/DVR combo to go on another airframe. I swapped out the 200mW video transmitter for a higher power model. I also bought a second frame and flight controller from someone at RCGroups for $15 and built a copy of #1, with similar motors and ESCs. Both copies have the same flight controller, camera, and video transmitter. I later bought two more sets of the FC + PDB/OSD to build versions #3 and #4 below, and then later bought another complete quadcopter from someone at RCGroups who could not get it to fly well. I made the same modifications I had made to #1 and #2, and now have a fifth copy. ALL FLYING - FPV
|
|||||||||||||||||||||||||||||||
Glow powered planes and helicopters.
|
|
1/12 Scale Lockheed SR-71 Blackbird - Built from plans. 102 inches long, 30 pounds - (2) OS 91 VR-DF with tuned pipes, Dynamax fans, pneumatic retracts, seven channels [left elevator(2 servos), right elevator(2 servos), left aileron(2 servos), right aileron(2 servos), rudders(2 servos), nose steering(1 servo), throttle(1 servo), retracts(1 servo)] The photo to the left shows me, 6'4" tall, standing next to the 8'6" long Blackbird for a size comparison. The photo to the right shows my three big wings with the Blackbird, which makes the Blackbird look small. The wings are 11', 13', and 16' across. |
 |
|
|
Blue Super Hots : I copied my old Super Hots as I rebuilt it. OS 61 SF, four channels [ailerons(1 servo), elevator(1 servo), rudder(1 servo), throttle(1 servo)] FLYING |
|
|
|
Profile Hots : I bought this at one of our club auctions. MVSS .46, four channels [ailerons(2 servos), elevator(1 servo), rudder(1 servo), throttle(1 servo)] FLYING |
|
|
|
X-29 Canard: Forward-swept wing with canard; this plane has taken many, many forms from the original twin .40 push-pull. OS 61 FSR, five channels (canard = elevator, main wing = elevons) [elevator(1 servo), elevons(2 servos), rudder(1 servo), throttle(1 servo)] FLYING |
|
|
|
Conniption III : This is the third Conniption I have built from my own plans. Take a look here to see the previous versions. This model was previously powered by an OS 46 LA, and then an electric propulsion system with a Tower Pro 3520 outrunner and 50 amp ESC, before being converted back to glow power with the pictured OS 50 SF. Five channels [ ailerons(2 servo), elevator(1 servo), rudder(1 servo), throttle(1 servo) ] FLYING |
|
|
|
Ultra Hots : I built this plane from plans. SuperTigre 3000, seven channels [ left aileron(1 servo), left flap(1 servo), right flap(1 servo), right aileron(1 servo), elevator(1 giant servo), rudder(1 giant servo), throttle(1 servo) ] crow flaps & ailerons, mixed elevator->flaps, flaps->elevator, ailerons->flaps. FLYING |
|
|
|
Hanger 9 Ultra Stick : This was repaired from a crashed plane found in the trash at the field. This was originally powered with an OS 61 SF with V-Tech tuned pipe, then converted to electric power with a 50-65 outrunner and 70 amp ESC, and then converted back to the original OS 61 version. Seven channels [ left aileron(1 servo), left flap(1 servo), right flap(1 servo), right aileron(1 servo), elevator(1 servo), rudder(1 servo), throttle(1 servo) ], crow flaps & ailerons, mixed elevator->flaps, flaps->elevator, ailerons->flaps. FLYING |
 |
|
|
Thunder Tiger Raptor 30 - OS 37 SZ-H with pipe, Futaba 401 Gyro, five channels[ cyclic fore-aft(1 servo), cyclic left-right(1 servo), rudder(1 servo), throttle(1 servo), collective(1 servo) ] FLYING |
|
|
|
Thunder Tiger Raptor 60 - OS 70 SZ-H with pipe, Thunder Tiger TG8000 Piezo Gyro, five channels [ cyclic fore-aft(1 servo), cyclic left-right(1 servo), rudder(1 servo), throttle(1 servo), collective(1 servo) ] FLYING |
|
 |
J-3 Piper Cub with floats : Built from Goldberg Anniversary Edition kit, floats built from Goldberg Cub floats kit. OS 61 STATIC DISPLAY |
|
  |
Razzle : ARF. Bought at the April 2026 GSWAM Spring Swap Meet for $30 for the airframe and engine. This plane had never been flown. Maiden flight on 10 May 2026 at GSWAM RC Flying Field. SuperTigre 61 engine, six channels [ left aileron (1 servo), right aileron (1 servo), left elevator (1 servo), right elevator (1 servo), rudder (1 servo), throttle (1 servo) ] | |
 |
Lanier Double Trouble : Built from kit. This was originally powered by a Tower Pro 3520 and 50 amp ESC, then converted to use the pictured OS 46 SF. Crashed and rebuilt in August 2020. Five channels [ ailerons(2 servos), rudder and nose rudder (1 servo), elevator(1 servo), throttle (1 servo)] FLYING |
|
Large electric planes and gliders.
 |
Double Trouble Electric : Built from plans. This copy of the Double Trouble was built from the start to be powered by an electric motor. All power comes from a 6S 2650 mah lipo battery pack. The second photo shows the glow and electric Double Troubles together; they fly about the same. Turnigy 4250-410 outrunner with a 70A ESC. Five channels [ ailerons(2 servos), rudder and nose rudder (1 servo), elevator(1 servo), throttle(ESC) ] FLYING |
 |
|
|
ACE Hog Bipe : Built from kit, built from start for electric power. Tower Pro 4130 outrunner with a 70A ESC. Four channels [ ailerons(2 servos), elevator(1 servo), rudder(1 servo), throttle(ESC) ] FLYING |
|
|
|
Balsa USA Phaeton II : Built from kit, ailerons added to top wing. This was previously powered by an OS 61 SF, but has been converted to electric power. Tower Pro 4130 outrunner with 70A ESC, four channels [ ailerons(2 servos), elevator(1 servo), rudder(1 servo), throttle(ESC) ] FLYING |
 |
|
|
Night Trainer LED : Built from scratch. This was originally powered by an OS 61 SF, then converted to electric power with a 60 size outrunner and a 70A ESC. The original covering was stripped, and hundreds of LEDs were added inside the wings and on the fuselage. I have eight super bright LEDs installed below the wing leading edge and one more below the nose. These super-bright LEDs are flashed in sequence like the NightRider car. All the LEDs are controlled by a home-made LED sequencer that is commanded via an RC channel from the ground. See this page for full details on the LED electronics. Five channels [ rudder(1 servo), elevator(1 servo), ailerons(2 servos), throttle(ESC), LED controller(12C508 PIC) ] FLYING |
 |
|
|
Lancair : I bought a raw fiberglass fuselage and wing foam cores at a swap meet, and built this. The power comes from two 60 size outrunners that are joined together on a single drive shaft, turning a 18x10 prop. Dual motor photo 1, photo 2. The motors were bought on line; the magnets had come off and the original owned did not want to fix the motors. I used JB Weld to re-glue the magnets to the cans, and they work great. Each motor has its own identical 70 amp ESC, and everything is connected with a home-made custom wiring harness that includes dual fail-safe safety plugs, and a large BEC from the 6S 5000 lipo battery to provide power to the RC system. Finished in white Krylon and Monokote. This plane looks and flies great. Four channels [ ailerons(2 servos), elevator(1 servo), rudder(1 servo), throttle(ESC x2) ] FLYING |
 |
|
|
J-3 Piper Cub: Built from Goldberg Anniversary Edition kit. Power comes from a Tower Pro 3520 ourunner brushless motor with a 50A ESC. Four channels [ ailerons(1 servo), elevator(1 servo), rudder(1 servo), throttle(ESC) ] FLYING |
|
|
|
Dynaflite F-4U Corsair : Built from kit, turtle deck raised to hold internal pipe and scale ABS cowling added, and later modified for electric power. It was flown with a Tower Pro 3520 outrunner brushless motor and 50A ESC, but is currently set up for static display, so it does not have any electronics in it. FLOWN - currently set up for STATIC DISPLAY |
|
  |
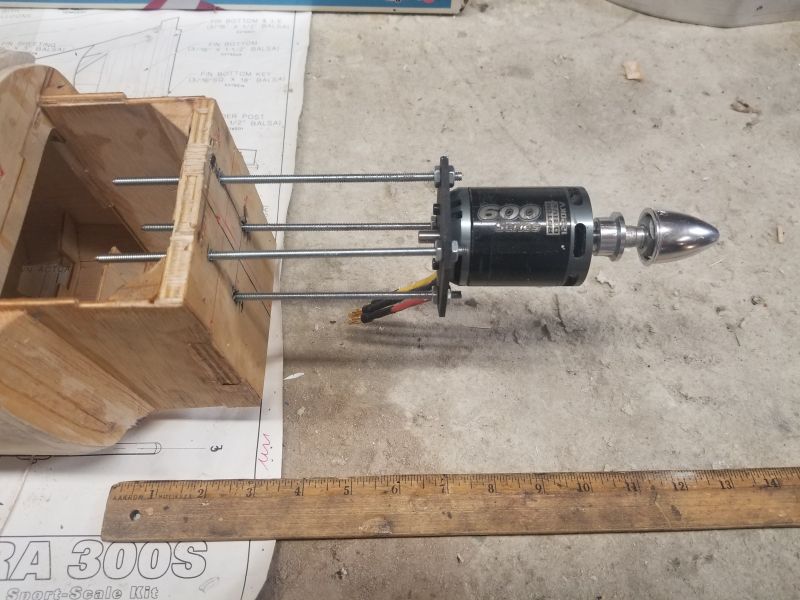
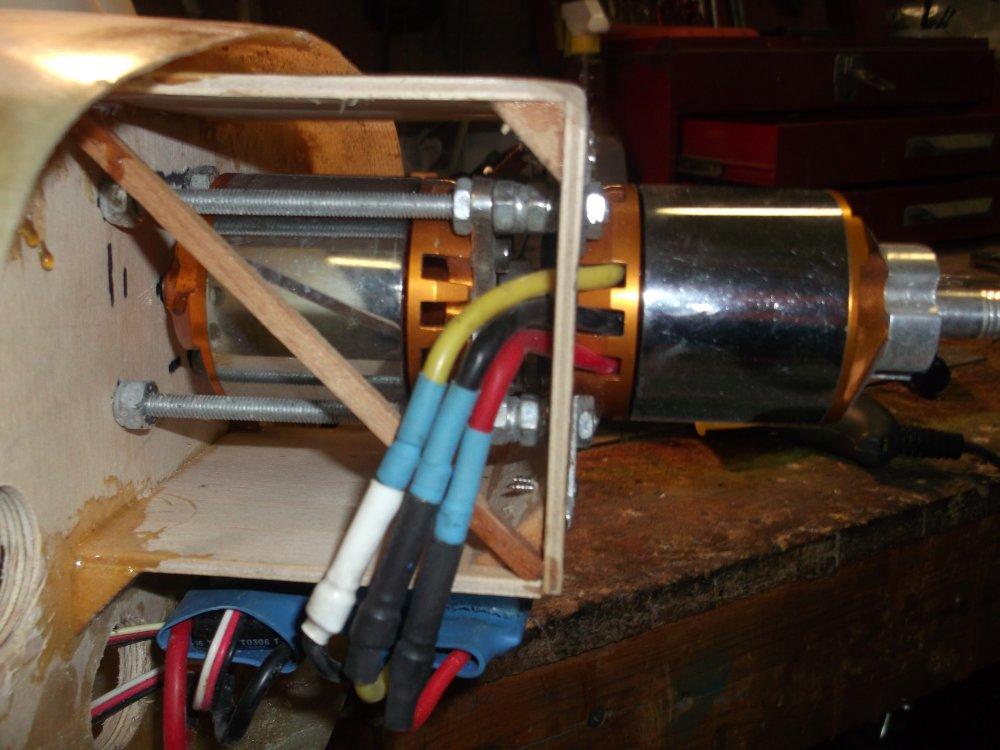
Great Planes Extra 300S : Kit built, 600 outrunner, 100A ESC, Five channels [ ailerons(2 servos), elevator (1 servo), rudder (1 servo), throttle (ESC) ] These photos show a good method for mounting a brushless motor within a large cowl. I use adjustable threaded rods to get the position correct with respect to the cowl and thrust-line, and then add in spruce cross-bracing for solid positioning and no twisting under the torque of swinging a large propellor. |
  |
 |
FMS Extra 300 : Foam ARF, 550 outrunner, 70A ESC, Five channels [ ailerons(2 servos), elevator (1 servo), rudder (1 servo), throttle (ESC) ] FLYING |
|
 |
E-Flite Extra 260 : Balsa ARF, EFlite 480 outrunner, 50A ESC, Five channels [ ailerons(2 servos), elevator (1 servo), rudder (1 servo), throttle (ESC) ] FLYING |
|
 |
E-Flite F-4 Phantom : Fiberglass ARF, 80 mm electric ducted fan, 150A ESC, DF32 brushless motor, Six channels [ ailerons(2 servos), flaps (2 servos), elevator (1 servo), rudder (1 servo), retracts (electric), throttle (ESC) ] Pictured with 1/48 scale plastic model F-4 Phantom. |
|
 |
Bird of Time LED : I bought this kit at a hobby shop in Lake Havasu, Arizona, with the express purpose to build it as a night flyer. It has hundreds of LEDs in the wings and on the fuselage, and 10 super-bright LEDs inside the wing leading edge. Those leading edge LEDs are flashed in sequence like the NightRider car. All the LEDs are controlled by a home-made LED sequencer that is commanded via an RC channel from the ground. See this page for full details on the LED electronics. Twin 2410 outrunners with 18A ESCs. Three meter wingspan electric glider, five channels [ rudder(1 servo), elevator(1 servo), left motor(ESC), right motor(ESC), LED control ] FLYING |
|
   |
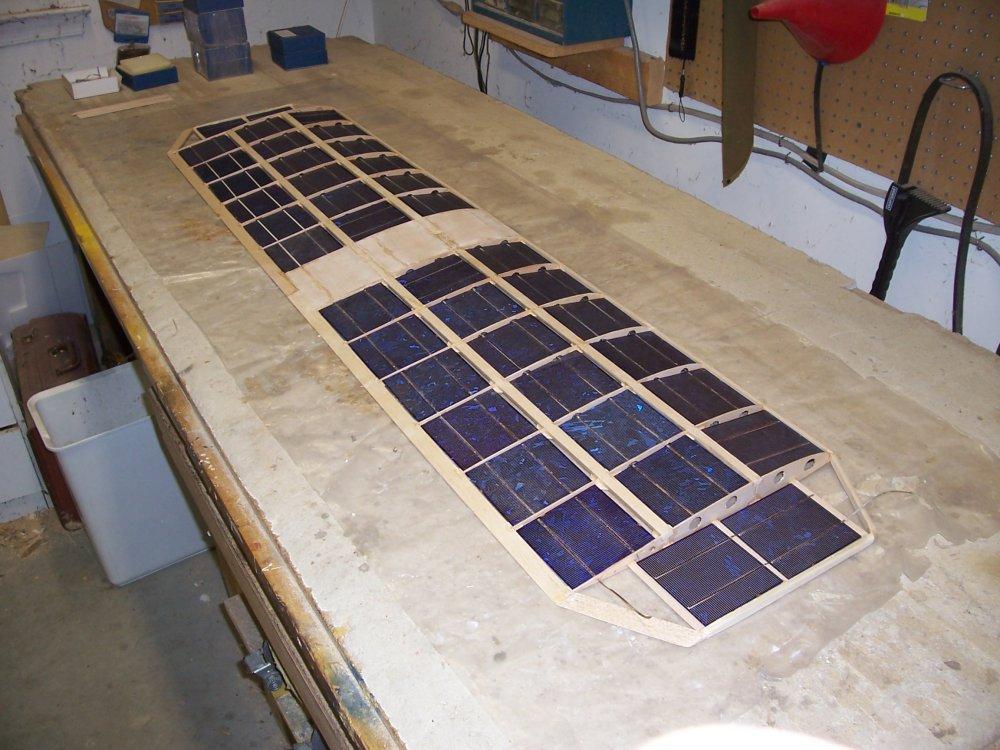
Solar Powered Electric Glider Test Aircraft I am building a four meter wingspan plane to attempt to set two world records for solar powered remote control aircraft; longest straight line distance and greatest altitude gain. The two planes shown in the first two photos were the test-beds for solar testing. The first plane had a four meter span with 48 watts of solar cells and was powered by a brushed speed 600 motor. The second plane had a one meter span with 16 watts of solar cells and was powered by a GWS IPS 100. Both planes have been cannibalized for solar cells and disassembled. The structure of the larger plane was built too light and the smaller plane was built too heavy. FLOWN - retired Solar Powered Electric Glider Canard Mini-size The third photo shows the mini test version of the design I have gone to for my solar project. It contains 16 solar cells, measured at 9.2 volts open circuit and 2.1 amps closed circuit in bright sunlight. IPS 100 geared motor, 4 amp ESC, 3 channels [ rudder(HS-55 servo), elevator(HS-55 servo), throttle (ESC)] Under Construction Solar Powered Electric Glider Canard Full-size Based on the results from the test aircraft and the design of the smaller solar canard, I have a new wing and fuselage setup that holds 140 watts of solar cells. The canard section, shown to the right with solar cells installed, holds 40 watts of solar cells. The main wing, with the center section shown to the right with no solar cells, holds 100 watts of solar cells. The final assembly will resemble the small solar canard above, but will be four times as large. Under Construction |
  |
|
|
Olympic 650 : This was my first kit, which I built in 1986. I re-covered the Monokote after about 20 years, shown to the left. I added a DYS 2826-1000 outrunner, 30A ESC, and folding prop in 2018, shown to the right. Two meter wingspan electric glider, three channels [ throttle (ESC), rudder(1 servo), elevator(1 servo) ] FLYING @ 37 years old in 2023 |
 |
 |
Gentle Lady LED : Built from a kit in 2018. This is powered by the same combination of DYS 2826-1000 outrunner, 30A ESC, and folding prop as the Olympic 650 above. There are 2 meters of high density white LEDs inside the wing with clear red and yellow covering, and the fuselage has white, yellow, red, and green LEDS along the sides. Two meter wingspan electric glider, three channels [ throttle (ESC), rudder(1 servo), elevator(1 servo) ] FLYING |
|
|
|
Sagitta 900 : I built this from a kit in 1992. I added a Neo 450 outrunner, 30A ESC, and 13x8 folding prop in March 2021. 2.4 meter wingspan electric glider, four channels [ throttle (ESC), rudder(1 servo), elevator(1 servo), spoilers(1 servo) ] FLYING @ 31 years in 2023 |
|
 |
Sagitta 600 : I bought this mostly finished kit at a swap meet in 2019. I modified the aileron setup, completed the final assembly and finishing, and covered it with three colors of Monokote. 400 outrunner, 25A ESC, 12x8 folding prop. Two meter wingspan electric glider, four channels [ throttle (ESC), rudder (1 servo), elevator (1 servo), ailerons (2 servos) ] FLYING |
|
   |
UFO-Blue LED : Flying disk covered with LEDs for night flying. I built a 36" diameter version of a plane similar to this one, from this thread at RCGroups. Check out this page to see the LEDs and how to set up LEDs. There are total of 150 super bright LEDs on the plane, along with six super-bright LEDs and a circular LED sequencer controlled by a PIC, decode counter, and inverters. The circuit and PIC code is available on the LED page. 450 outrunner, 30A ESC, five channels [ elevons(2 servos), throttle (ESC), LED flash mode, LED flash rate ] FLYING UFO-Pink LED : I copied the UFO-Blue, and made a new set of LED flashing lights with a different flashing sequence and different colors. There are fixed LED strips, and 8 super-bright LEDS facing down. The super-bright LEDs are controlled by a PIC 12c508 reading two channels from the RC receiver and driving 4 TIP120 transistors. The circuit and PIC code is available on the LED page. 450 outrunner, 30A ESC, three channels [ elevons(2 servos), throttle (ESC), LED flash mode, LED flash rate ] FLYING Both UFO's are controlled via Lemon Stabilizer Plus receivers, with three flight modes: gyros off (manual), gyros on (rate mode), auto-level (gyros + accelerometers). Gain adjustment is on a separate channel for adjustments while flying. |
   |
  |
Switcheroo : This was built on a dare from a friend. I was flying the Morback 4D at the field one day and he suggested that I build a plane that could fly both directions by swapping the motor thrust around. The final goal is a plane that can transform in the air, but this version is the first step. It can fly in both directions, in standard configuration and as a canard. This version needs to be swapped around on the ground by physically moving the rudder, which is attached to the fuselage with velcro. 400 size outrunner, 20A ESC, four channels. FLYING - BOTH DIRECTIONS |
|
  |
Foame IIx 3D Biplane LED : I have built three of these from the free plans at 3DBatix.com, two at full size and the other slightly reduced at 86%. The 86% version was retired, and the first 100% version was given away in 2025. I continue to fly the last 100% version, which comes apart for travel. They hover and torque roll with ease when the CG is moved far backwards. These planes are covered with LEDs. The top to bottom wing aileron linkage can be made out a small piece of hinge material and a CF rod. There is no slop and this is lighter and simpler than a clevis-based link. The second 100% version is foldable, so I can take it on trips. Here are the FOLDABLE instructions on making a transportable version. Here is a video of the foldable version on a night flight at the Arctic Circle in Sweden in 2011. Five channels [ left aileron (1 servo), right aileron (1 servo), elevator(1 servo), rudder(1 servo), throttle(ESC) ] FLYING
|
|
 |
Morback 4D : Built from plans on-line, with some modifications to make it lighter. Variable pitch prop (VPP) for reverse thrust. Flight in April 2026. Himax HC2812-1080 outrunner, 17A ESC, VPP, six channels [ ailerons(2 servos), VPP(1 servo), elevator(1 servo), rudder(1 servo), throttle(ESC) ] FLYING |
|
  |
F-27 Stryker Twin - Thrust Vectoring : EPP foam fuselage. Rudder is mixed into throttle for yaw thrust. Twin counter-rotating 2208-12T outrunners with 18A ESCs, Orange 6ch DSMX stabilized receiver, five channels [ left elevon and motor tilt(1 servo), right elevon and motor tilt(1 servo), left throttle(ESC), right throttle(ESC), stabilizer on/off ] FLYING On-board video showing the dizzying spin rate of 1200 deg/sec, or 200 RPM, in an inverted flat spin. I modified the setup by stiffening the engine mounts and servo pushrods, and attaching the props directly to the motor shafts without prop-savers. This has increased the rotation rate. This video shows the plane now rotating at 1350 deg/sec, or 225 RPM, in an inverted flat spin. |
|
 |
F-27 Styker Camo : EPP foam fuselage, 25mm 2200 kv inrunner, 35A ESC, Orange 6ch DSMX stabilized receiver, four channels [ elevons (2 servos), throttle(ESC), stabilizer on/off ] FLYING |
|
 |
F-15 STOL/MTD - Thrust Vectoring : The main airframe is based on JetSet44's F-15 plans at RCGroups. I added the movable canards as they were flown on the real F-15 Short Takeoff and Landing / Maneuver Technology Demonstrator, and the thrust vectoring twin engine setup used on my SU-37, X-42, and Twin Styker. I rewound two 2408-21 outrunner motors using 12 turns of 22 AWG wire, as detailed here at RCGroups. Twin counter-rotating 2408-12 outrunners with 18A ESCs, six channels [ left stab and motor tilt(1 servo), right stab and motor tilt(1 servo), left canard(1 servo), right canard(1 servo), left throttle(ESC), right throttle(ESC) ] FLYING |
|
 |
SU-37 - Thrust Vectoring : Built from JetSet44's plans at RCGroups. The only control surfaces are the independent full flying horizontal stabs. The twin electric motors are throttled independently via rudder mixing for yaw control, and are connected to the stabs for thrust vectoring. Made from BlueCor, this plane flies amazingly well. Twin counter-rotating 2408-21 outrunners with 18A ESCs, four channels [ left stab and motor tilt (1 servo), right stab and motor tilt (1 servo), left throttle (ESC), right throttle (ESC) ] FLYING |
|
 |
X-42 Deltastorm - Thrust Vectoring : Built from T3chDad's plans at RC Groups, with thrust vectored motors, modified rudders, and fixed canards. Rudder is mixed into throttle for yaw thrust. Twin counter-rotating Donkey ST2204-1700 outrunners with 10A ESCs, Orange 6ch DSMX stabilized receiver, five channels [ left elevon and motor tilt(1 servo), right elevon and motor tilt (1 servo), left throttle (ESC), right throttle (ESC), stabilizer on/off ] FLYING |
|
   |
ComBATs : Built from kram242's plans at RC Groups. This is from the creator of the Phlatboyz website. I had two of these, and a friend at work has another one. Lunch was turned into combat time for a couple years. I retired one of these airplanes when I moved to Texas, but still have one ComBAT flying. The two bottom photos were taken in May 2026 of my last flying ComBAT. Bluecor foam, 2408-21 outrunner and 18 amp ESC, four channels [ elevons (2 servos), rudder (1 servo), throttle (ESC)] FLYING |
|
 |
Pitts Special : Small balsa built-up biplane. Four channels [ elevator (1 servo), ailerons (2 servos), rudder (1 servo), throttle (ESC)] FLYING | |
 |
Thrust Vectored Funjet : Foam aircraft with yaw thrust vectoring. Five channels [ elevons (2 servos), rudder (1 servo), throttle (ESC), stabilizer on/off ] FLYING | |
Finally, my only remaining car.
 |
Team Associated RC-10 : I still have my original carbon fiber frame RC-10 that I built in 1987 and have been driving ever since. Electric car built from kit. Two channels [ steering(1 servo), throttle (ESC) ] |
  |
RC Transmitters - I have used Futaba, Airtronics, JR, and Spektrum radios through 35+ years of flying RC. I started using 2.4 Ghz radios in 2010, and sold my remaining 72Mhz radios in 2018 when I went to only 2.4 GHz Spectrum equipment. I currently have a Spectrum DX9 as my primary radio, and DSMX receivers in many of my aircraft. I use a RadioMaster TX16S transmitter with a 4-in-1 internal RF section and Crossfire external module for my FPV aircraft and multi-rotors. These long range FPV aircraft are equipped with Crossfire receivers: 6' Travel Wing, 5' Travel Wing, Caipirinha Wing, NanoTalon, Reptile 800 Wing, 10" Long Range Quadcopter, Hyperlow 5" Quadcopter, Cycle Glide 5" Quadcopter. I also have a JR XP8103 transmitter with an Orange UHF 915 MHz OpenLRS-NG UHF 1 watt long range transmitter module for my long range FPV aircraft. My XP8103 transmitter is also modified with a discrete switch setup on channel 8, used to command multiple flight modes in the flight controller software I use for my FPV aircraft. See my RC electronics page for full details on how to build this switch setup. |
Gone - My planes that have passed on to higher levels of existence (firewood), along with planes I have sold or retired over the years. The main page above lists the aircraft I have that are flying.
Night Flyers - There are many electric aircraft scattered throughout this main page that I have made for night flying. All of these night flyers have fixed LED strips, and five of these night flyers also have home-made RC-controlled LED flashing sequencers for their LEDs. This page shows these night flying planes and their various LED setups, along with wiring schematics and code for the PICs controlling the flashing sequences. Any plane listed above with 'LED' in the name is a night flyer, covered with LEDs.
RC Electronics - On this page: HK Multi-rotor 2.1 flight controller (rate gyros only) + new firmware changes, HK KK 2.0 flight controller (rate gyros + accelerometers) + new firmware, HK 401B gyros with new timing circuits and home-made mixers as 3D stabilizers, split drag rudder controllers for flying wings, PIC-based servo PWM driver, Draganfly FET Interface PIC, RSSI on E-OSD, UHF OpenLRSng, Immersion Fusion Vortex F1 FC. The schematics and programming for all these projects is on this page.
RC Aerial Photography & Video - The low cost of small digital cameras and first person view (FPV) equipment has made aerial photography, video, and FPV a huge part of the RC hobby. This page contains schematics and programming of the PIC-based camera controllers I have made for various digital cameras, and links to YouTube videos I have shot with my aircraft all over the United States and Europe. Any plane listed above with 'FPV' in the name has first person view video equipment.
Flying Fields - Some of the RC flying fields I have flown at over the years in Colorado, Ohio, Nevada, Maryland, Alabama, Mississippi, Tennessee, Virginia, West Virginia, Texas, New Mexico, California, Utah, Wyoming, Arizona, Utah, South Carolina, Georgia, Florida, and at the AMA national flying site in Muncie, Indiana. I have lots more photos and video from all over the United States and Europe on my Aerial Photography & Video web page.
Electric Power References: Brushless Motor Guide, Brushless Motor Rewinding Wire Calculator, Tower Pro Brushless Speed Control User Guide, Tower Pro 50 and 70 amp Brushless Speed Control Manual, Tower Pro Motor Specifications, Hobby King 401B Gyro Manual
'For What Its Worth' - Some helpful RC hints.
Setup of the Telebee 701 Heading Hold Piezo Gyro - This gyro is a capable piece of equipment, but the directions that come with it are not very helpful. This page will help.
The $8 Remote Control Airplane - How to make your own $8 RC aircraft.


































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}