
FPV Flying Wings
FPV Pink Wing #1 : EagleTree System
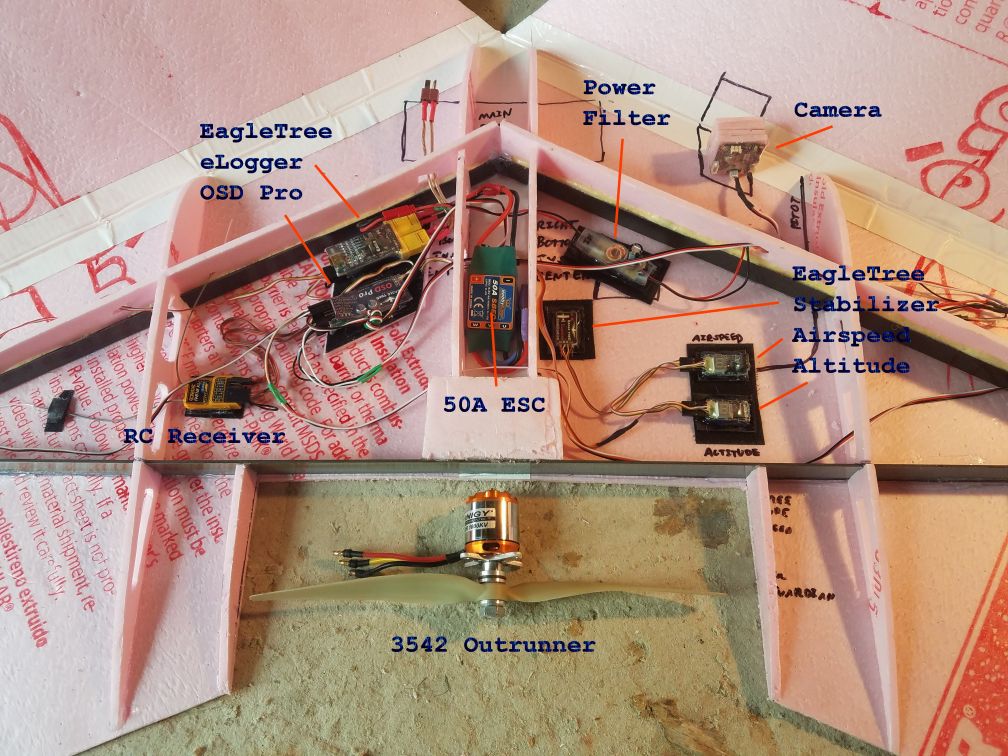
My first FPV first wing is powered by a 3542 brushless outrunner with a 50A ESC
and 5200mah 3S lipo. There is no lead in the nose with this large battery.
The control is via a DSMX receiver and two HobbyKing digital servos.
I have a complete EagleTree system in this FPV flying
wing, with an airspeed sensor, barometric pressure altitude sensor,
stabilizer, GPS, data recorder, voltage and current sensors, and an OSD.
The plane is a 2M flying wing and everything fits inside the wing for a
nice clean installation. It has ended up being a very good flying plane with
excellent video quality, handling characteristics, and the performance of the
EagleTree system has been impeccable.
After I bought the EagleTree system but before it was installed to my flying wing, I used it for part of an airspeed verification flight test series on a very large,
commercial UAV for the company I work for. While the complete EagleTree system costs
a bit, it is plug and play and works right out of the box.
Here is a link to EagleTree’s website:
http://www.eagletreesystems.com/
The video portion is comprised of a CCD camera, 600mW 5.8Ghz Tx, and power filter. The video from the camera feeds through the EagleTree OSD Pro before running to the video transmitter. The OSD Pro is set up to overlay GPS data, baro altitude, airspeed, pack voltage, current draw, total watts, and an artificial horizon onto the video downlink. First flight was on Saturday, 29 April 2017.


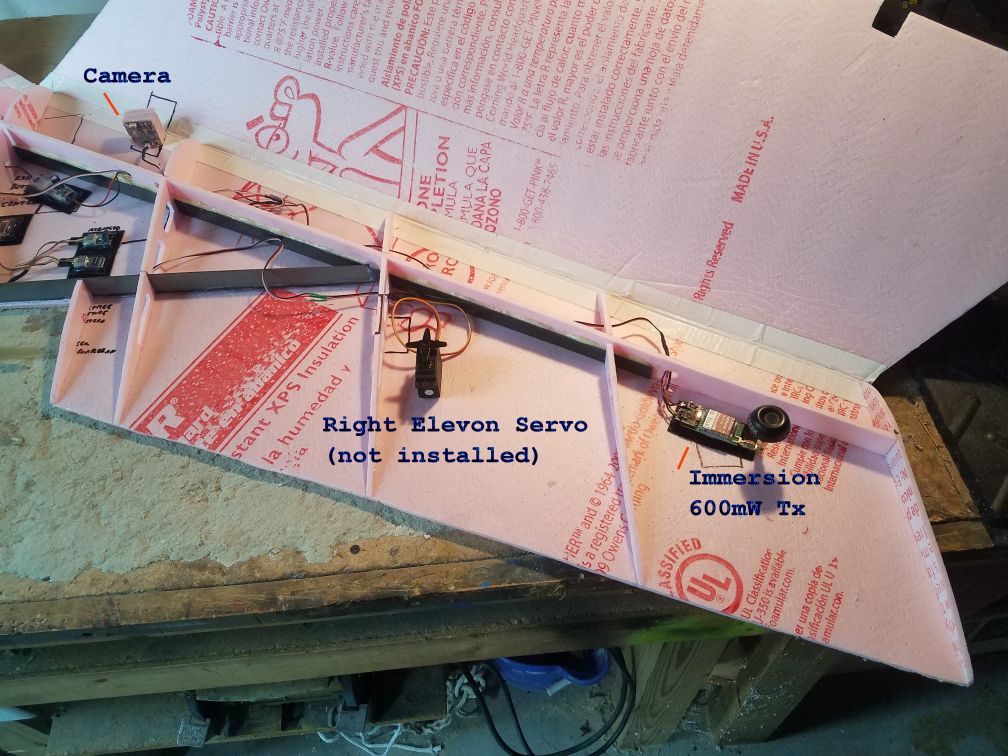
The pitot tube for the airspeed sensor slides into the wing for storage and transport. There is a foam stop behind the tube in the wing; the stop fits in the Y between the static and pitot pressure lines. Friction is all it takes to keep the pitot tube forward for flight. The first three photos below show the pitot tube mechanism before the top sheet of foam was folded over. It is tilted down slightly with respect to the bottom of the wing so it points more closely into the wind when the wing is flying at several degrees alpha (AoA).



These photos show the completed wing. You can see the pitot tube pushed out in the left photo, and retracted in the right photo.


The Immersion 600mW 5.8Ghz video transmitter originally installed was not performing well, so I swapped it out for a Boscam 600mW 5.8Ghz video transmitter in October 2017, which has improved the video very much. I have also upgraded the camera to a higher quality 1000 TVL model. Here are some aerial videos recorded from the downlink at the receiver on the ground. I updated the video overlay layout to improve the layout readability and include more GPS data before the second video was recorded.
FPV Pink Wing #2 : Flip32 Flight Controller w/ OSD + uBlox GPS
| I have Flip32 flight controllers running BetaFlight in
several of my multirotors, and they do a good job flying my acro and racing
quads.
The Flip32 is a variant of
the more well-known Naze flight controller.
In addition to the standard accelerometer and gyros which make up the
inertial measurement unit (IMU), the Flip32 has a barometric pressure
sensor for altitude, voltage and current sensors, and includes on-screen display
(OSD) hardware that can run several popular OSD software packages, including MWOSD.
This combination is great for its size, performance, and cost; it is only
$10.
Here is a link to that Flip32
from HobbyKing:
https://hobbyking.com/en_us/flip32-naze32-all-in-one-pro.html |

 Flip32 FC's |
| I purchased an Eachine V-Tail 210 quadcopter a while back
when it was on sale at Banggood.
It
comes with a small uBlox GPS, which I removed during the initial setup and
modifications I made to that quadcopter to have a lighter, stronger frame. Those V-Tail
210 mods are detailed here:
https://www.rcgroups.com/forums/showthread.php?2917527-Eachine-V-Tail-210-Quad-Mods
The uBlox GPS is very small, performs well, can be attached to other devices easily, and is cheap. This uBlox GPS can be purchased by itself for $7. I connected it to a MinimOSD running MWOSD compiled for direct connection to a GPS, and installed it to another of my FPV planes, this time a Stryker. Here is a link to that uBlox GPS module from Banggood: https://www.banggood.com/GPS-Module-with-Ceramic-Antenna-GPS-Receiver-TTL9600-Ublox-Module-for-Multirotor-p-1100984.html |

 Quad 210 w/GPS --> Stryker w/GPS |
I had all these pieces sitting in different planes and multirotors, and I compared their performance and capabilities. It occurred me that the Flip32/OSD + uBlox GPS, which can be purchased for $17 total including shipping, gives about the same capabilities as the EagleTree system, which costs a lot more. You must be able to do soldering, software installation and setup to get the Flip32/OSD + uBlox GPS to work. For a fixed wing airplane, iNav software is installed instead of CleanFlight or BetaFlight. The installation and setup of iNav is done with the iNav Configurator, available for free on-line. The OSD hardware comes pre-installed with MWOSD 1.5. The setup of MWOSD is done with the Scarab MWOSD configure program, also available for free on-line. While these software packages are free, if you enjoy their use, please consider donating to the authors as they have spent a lot of time on the development. If you wish to update to the latest version of MWOSD, version 1.7, you will have to purchase the configure program for $2.

uBlox GPS, Flip32 FC with battery leads, camera, Boscam video Tx, DSMX
618 Rx w/ PPM output
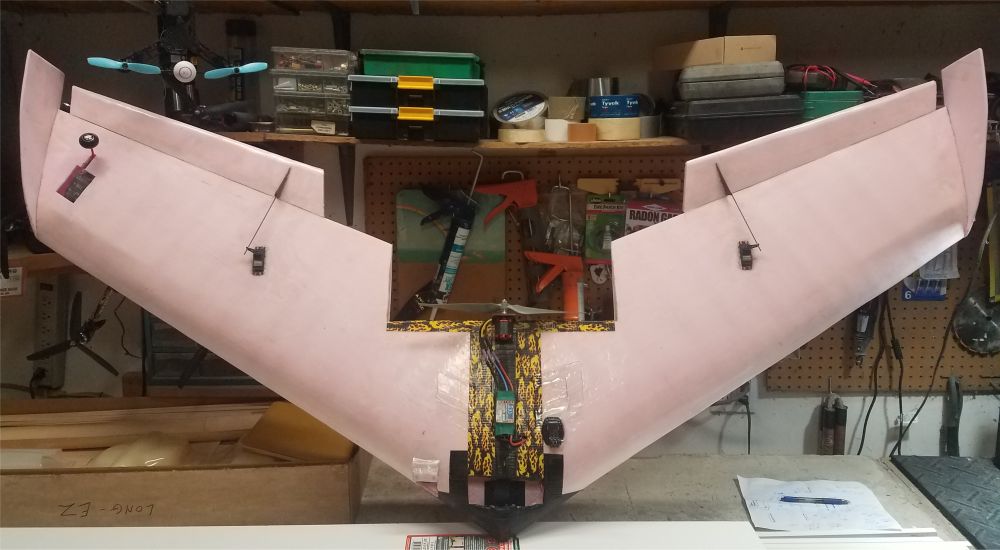
I bought additional Flip32 FCs and uBlox GPS receivers, and
have installed a set to second, identical 2M flying wing.
Both flying wings have the exact same cameras and 5.8 Ghz video transmitters for
the video portion of the setup.
This
has allowed an easy comparison of the two setups; EagleTree equipment in one
flying wing versus the Flip32/OSD + GPS hardware in the other flying wing.

The chart below compares the EagleTree to the Flip32 + GPS
for a fixed wing airplane setup.
While the Flip32 can also control multirotors with different software, I have
left that option out for this comparison as it would complicate this chart.
I know I am missing stuff on both sides, but these are the highlights.
If you take away the airspeed sensor from the EagleTree configuration,
which lowers the EagleTree cost a little, you get about the same hardware and
abilities from both setups.
|
Hardware |
EagleTree OSD Pro |
Flip32 FC w/ OSD |
|
Cost |
>$200 |
$17 |
|
Drop-in installation |
Yes, very easy |
A bit of work… |
|
Software |
pre-installed |
iNav – to install to FC |
|
Setup software |
EagleTree |
iNav Configurator |
|
|
|
|
|
On screen display |
Yes |
Yes |
|
Voltage sensor |
Yes |
Yes |
|
Current sensor |
Yes |
Yes |
|
Data recording |
Yes |
No |
|
|
|
|
|
Accelerometers + Gyros |
Yes |
Yes |
|
Stability augmentation |
Yes |
Yes |
|
Auto-level |
Yes |
Yes |
|
|
|
|
|
GPS sensor |
Yes |
Yes |
|
Return home |
Yes |
Yes |
|
Waypoint Navigation |
3 points |
30 points |
|
Radar / Which way home? |
Yes |
Yes |
|
|
|
|
|
Baro altitude sensor |
Yes |
Yes |
|
Variometer |
Yes + audio |
Yes |
|
Altitude hold |
No |
Yes |
|
|
|
|
|
Airspeed sensor |
Yes |
No |
Getting everything in that Flip32 column to work takes time and some learning, and that is what this article is about.
<add wiring diagram>
<add screen captures of iNav installation and setup, OSD setup, OSD display>